AV Linux MXe Edition 23.1 für Kreative
25. Januar 2024 um 07:48
AV Linux MXe Edition 23.1 ist die neueste Version dieser Multimedia-Distribution. Auf der Basis von MX Linux arbeitet der Liquorix-Kernel 6.6.9
AV Linux MXe Edition 23.1 ist die neueste Version dieser Multimedia-Distribution. Auf der Basis von MX Linux arbeitet der Liquorix-Kernel 6.6.9
Das Asustor Flashstor 12 Pro hat ein Alleinstellungsmerkmal: Es ist das einzige NAS, das mit 6 oder 12 NVMe-SSDs ausgestattet werden kann.
Selten bleibt eine Anwendung so lange verborgen wie der japanische Firefox-Ableger Floorp. Der auf Firefox ESR basierende Browser bietet guten Datenschutz und viel Einfluss auf Aussehen und Handhabung.
Mit MX Linux 23.2 veröffentlichen die Entwickler das zweite Erhaltungs-Release von MX Linux 23 »Libretto«. Es basiert auf Debian 12 und führt PipeWire 1.0 ein.
Mit Firefox 122 bietet der Mozilla-Browser eine stabilere Übersetzungsfunktion sowie Unterstützung für Passkeys. Erstmals wird auch offiziell ein Debian-Paket angeboten.
Regelmäßig nach einem Release von Linux Mint folgt ein EDGE-ISO mit aktualisiertem Kernel. Jetzt ist das EDGE-ISO zu Linux Mint 21.3 verfügbar
Jorge Castro bietet mit Bazzite 2.2.0 ein Update seiner für Gamer konzipierten unveränderlichen Distribution auf der Basis von Fedora.
Die auf Debian basierende Linux-Distribution DietPi wird monatlich aktualisiert. Das Release 9.0 für den Monat Januar wird erst ab Debian 11 »Bullseye« unterstützt.
Ein neuer adminForge Service kann ab sofort genutzt werden.
Mit der kostenlosen Open Source Lösung unbox.at schützt du deinen Posteingang mit E-Mail-Aliasnamen. Antworte anonym auf weitergeleitete E-Mails. Der Absender erhält die E-Mail so, als käme sie von deinem Alias. Oder starte eine Konversation direkt von deinem Alias aus.
Software: addy.io
Euer adminForge Team
Unterstütze unsere Arbeit mit einer Spende und diskutiere ins unserem Chat mit. |
by adminForge.
Noch rund 40 Tage verbleiben bis zum geplanten Release von Plasma 6. Die Planung und Ausführung erscheinen fast generalstabsmäßig und lassen einen nahtlosen Übergang erwarten.
Befehle sind das Salz in der Linux-Suppe. Wenn da bloß nicht die vielen Optionen wären. Zwei Tools schaffen etwas Licht im Dunkel.
Das ist der dritte Teil einer Mini-Serie zur GPIO-Nutzung am Raspberry Pi 5:
Genau genommen hat die Kamera-Nutzung nicht unmittelbar etwas mit GPIOs zu tun. Allerdings ist für die Kommunikation mit der Kamera ebenfalls der neu im Pi 5 integrierte RP1-Chip verantwortlich. Der Chip ist der Grund, weswegen alte Kamera-Tools auf dem Raspberry Pi 5 nicht mehr funktionieren. Bevor Sie zu schimpfen beginnen: Der RP1 hat viele Vorteile. Unter anderem können Sie nun zwei Kameras gleichzeitig anschließen und nutzen und höhere Datenmengen übertragen (wichtig für Videos).
Beachten Sie, dass Sie beim Raspberry Pi 5 zum Kamera-Anschluss ein neues, schmaleres Kabel benötigen!

Im Terminal bzw. in Bash-Scripts funktionieren raspistill, raspivid usw. nicht mehr. Sie müssen stattdessen rpicam-still, rpicam-vid etc. einsetzen.
In Python-Scripts müssen Sie Abschied vom picamera-Modul nehmen. Stattdessen gibt es das vollkommen neue Modul Picamera2. Es bietet (viel) mehr Funktionen, ist aber in der Programmierung komplett inkompatibel. Vorhandene Scripts können nicht portiert werden, sondern müssen neu entwickelt werden.
Sowohl die rpicam-xxx-Kommandos als auch das Picamera2-Modul greifen auf die ebenfalls neue Bibliothek libcamera2 zurück.
Im einfachsten Anwendungsfall erzeugen Sie ein Picamera2-Objekt, machen mit der Methode start_and_capture_file ein Foto und speichern dieses in eine Datei. Dabei kommt die volle Auflösung der Kamera zur Anwendung, beim Camera Module 3 immerhin fast 4600×2600 Pixel.
#!/usr/bin/env python3
# Beispieldatei camera.py
from picamera2 import Picamera2
cam = Picamera2()
# ein Foto machen und speichern
cam.start_and_capture_file("test.jpg")
Anstelle von start_and_capture_file gibt es zwei weitere Methoden, um ebenso unkompliziert Bilderfolgen bzw. Videos aufzunehmen:
# 10 Bilder im Abstand von 0,5 Sekunden aufnehmen
# mit Dateinamen in der Form series-0003.jpg
cam.start_and_capture_files("series-{:0>4d}.jpg",
num_files=10,
delay=0.5)
# Video über 10 Sekunden aufnehmen (640x480 @ 30 Hz, H.264/AVC1)
cam.start_and_record_video("test.mp4", duration=10)
Zum Test der Kamera sowie zur Aufnahme von Bildern und Videos stehen die folgenden neuen Kommandos zur Auswahl:
rpicam-jpeg, Optionen etwas kompatibler zu raspistill)Die Kommandos sind mit all ihren Optionen großartig dokumentiert. Es gibt zwar keine man-Seiten, aber dafür liefern die Kommandos mit der Option -h eine lange Liste aller Optionen (z.B. rpicam-still -h). Ich beschränke mich hier auf einige einfache Anwendungsbeispiele.
# fünf Sekunden lang ein Vorschaufenster anzeigen, dann
# ein Foto aufnehmen und speichern
rpicam-jpeg -o image.jpg
# ohne Vorschau, Aufnahme nach einer Sekunde (1000 ms)
rpicam-jpeg -n -t 1000 -o image.jpg
# wie oben, aber Debugging-Ausgaben nicht anzeigen
rpicam-jpeg -n -t 1000 -v 0 -o image.jpg
# Bildgröße 1280x800
rpicam-jpeg --width 1280 --height 800 -o image.jpg
# heller/dunkler (EV Exposure Compensation)
rpicam-jpeg --ev 0.5 -o brighter.jpg
rpicam-jpeg --ev -0.5 -o darker.jpg
# erstellt ein 10 Sekunden langes Video (10.000 ms)
# 640x480@30Hz, H264-Codec
rpicam-vid -t 10000 -o test.mp4
# wie vorher, aber höhere Auflösung
rpicam-vid --width 1024 --height 768 -t 10000 -o test.mp4
Falls Sie mehr als eine Kamera angeschlossen haben, können Sie diese mit rpicam-hello --list-cameras auflisten. Die bei einer Aufnahme gewünschte Kamera können Sie mit der Option rpicam-xxx --camera <n> festlegen.
picamera2 ist ein relativ neues Python-Modul. Es ersetzt das früher gebräuchliche Modul picamera. Der Hauptvorteil von picamera2 besteht darin, dass das Modul zu aktuellen Raspberry-Pi-Modellen kompatibel ist. Beim Raspberry Pi 5 kommt picamera2 auch mit dem Fall zurecht, dass Sie zwei Kameras gleichzeitig an Ihren Minicomputer angeschlossen haben.
Eine umfassende Referenz aller Klassen und Methoden finden Sie in der exzellenten Dokumentation (nur im PDF-Format verfügbar), die allerdings weit mehr technische Details behandelt, als Sie jemals brauchen werden. Eine Menge Beispiel-Scripts finden Sie auf GitHub.
Mit create_still_configuration können Sie in diversen optionalen Parametern Einstellungen vornehmen. Das resultierende Konfigurationsobjekt übergeben Sie dann an die configure-Methode. Wichtig ist, dass Sie das Foto nicht mit start_and_capture_file aufnehmen, sondern dass Sie die Methoden start und capture_file getrennt ausführen. Die folgenden Zeilen zeigen, wie Sie ein Bild in einer Auflösung von 1024×768 Pixel aufnehmen. Die sleep-Aufforderung verbessert die Qualität des Bilds. Sie gibt der Kamera-Software etwas Zeit, um die Aufnahme zu fokussieren und richtig zu belichten.
#!/usr/bin/env python3
from picamera2 import Picamera2, Preview
import time
# ein Foto in reduzierter Auflösung aufnehmen
cam = Picamera2()
myconfig = cam.create_still_configuration(
main={"size": (1024, 768)} )
cam.configure(myconfig)
cam.start()
time.sleep(0.5)
cam.capture_file("1024x768.jpg")
Mit Transformationen können Sie das aufgenommene Bild vertikal und horizontal spiegeln. Falls Sie die Kamerakonfiguration während der Ausführung eines Scripts ändern möchten, müssen Sie die Kamera vorher stoppen und danach neu starten.
# (Fortsetzung des obigen Listings)
cam.stop()
from libcamera import Transform
mytrans = Transform(hflip=True)
myconfig = cam.create_still_configuration(
main={"size": (1024, 768)},
transform=mytrans)
cam.configure(myconfig)
cam.start()
time.sleep(0.5)
cam.capture_file("1024x768-hflip.jpg")
Bei der Aufnahme von Videos haben Sie die Wahl zwischen drei Encodern, die die aufgenommenen Bilder in Video-Dateien umzuwandeln:
H264Encoder (Hardware-Encoder für H.264, kommt per Default zum Einsatz, max. 1080p@30 Hz)MJPEGEncoder (Hardware-Encoder für Motion JPEG = MJPEG)JpegEncoder (Software-Encoder für MJPEG) Hardware-Encoding steht nur auf dem Raspberry Pi 4 (H.264 und MJPEG) und dem Raspberry Pi 5 (nur H.264) zur Verfügung. Beim Raspberry Pi 5 läuft der MJPEGEncoder also per Software.
Das folgenden Script soll ein Video im Format 720p aufnehmen und gleichzeitig ein Vorschaubild anzeigen. Dabei soll der H.264-Codec eingesetzt werden.
#!/usr/bin/env python3
from picamera2 import Picamera2, Preview
from picamera2.encoders import H264Encoder, Quality
import time
cam = Picamera2()
myconfig = cam.create_video_configuration(
main={"size": (1280, 720)}) # Auflösung 720p
myencoder = H264Encoder()
cam.configure(myconfig)
cam.start_preview(Preview.QTGL)
time.sleep(0.5)
cam.start_recording(myencoder,
"test-720p.mp4",
quality=Quality.MEDIUM)
time.sleep(10)
cam.stop_recording()
cam.stop_preview()
Das Script zeigt zwar keine Fehlermeldungen an, allerdings lässt sich die Video-Datei nicht abspielen, weder mit VLC am Raspberry Pi noch mit anderen Video-Playern auf anderen Rechnern. Ich habe tagelang mit den Video-Funktionen von Picamera2 experimentiert, aber die resultierenden Videos waren meist schwarz oder enthielten nur ein Bild, das am Beginn der Aufnahme entstanden ist. Auch die auf der folgenden Seite gesammelten Beispiel-Scripts zum Video-Recording funktionierten bei meinen Tests entweder gar nicht oder nur mit Einschränkungen:
https://github.com/raspberrypi/picamera2/tree/main/examples
Fazit: Die Video-Funktionen von Picamera2 sind aktuell (Anfang 2024) ebenso ambitioniert wie unausgereift. Es ist zu hoffen, dass neue Versionen von libcamera und Picamera2 und eine bessere Dokumentation der Grundfunktionen in Zukunft Abhilfe schaffen. Was nützen coole Spezial-Features, wenn es schon bei den einfachsten Grundfunktionen Probleme gibt?
Ein neues Camera-Portal soll mit Unterstützung von PipeWire die Kamera-Unterstützung bereits in der nächsten Version von OBS Studio verbessern.
Flathub ist die größte Plattform zum Entdecken und Herunterladen von Flatpaks. Das schnelle Wachstum der Plattform brachte aber auch Probleme mit sich.
Wine ist eine Laufzeitumgebung zur Ausführung von moderner Windows-Software und Games unter Linux, Chrome OS, macOS und anderen Plattformen. Einmal
Noch 42 Tage verbleiben bis zur Veröffentlichung von Plasma 6. Das neue Wallpaper wurde gekürt und das Ziel der Spendenkampagne bereits jetzt übertroffen.
Das Jahr 2024 ist nun schon zwei Wochen alt. Dennoch möchte ich noch einen Blick zurückwerfen und mich erinnern, wie das Jahr 2023 für meinen Blog verlaufen ist.
In 2023 wurden auf My-IT-Brain insgesamt 45 Artikel veröffentlicht. Dies sind 16 mehr als in 2022 und 14 mehr als in 2021. Jeden Monat sind mindestens zwei Artikel veröffentlicht worden.
Die Themen waren dabei wieder bunt gemischt. Allein Artikel über die Red Hat Enterprise Linux (RHEL) System Roles zogen sich wie ein roter Faden durch den Blog. Welche Artikel haben denn euch am besten gefallen? Lasst es mich gerne in den Kommentaren wissen.
Ich hoffe, es war für jeden von euch etwas Interessantes mit dabei und ihr folgt diesem Blog auch in 2024. Ihr könnt mir auch gerne Anregungen in die Kommentare schreiben, welche Themen ihr hier gerne behandelt sehen wollt. Vielleicht greife ich ja einige davon auf.
Und nun aber auf in ein spannendes Jahr 2024!
Ayaneo erweitert das zuletzt durch die Bank weg kostspielige Portfolio an Gaming-Handhelds um ein günstigeres Modell, das ab 299 USD zu haben ist. Das Ayaneo Next Lite setzt zu diesem Zweck auf eine vier Jahre alte Ryzen-Plattform und verzichtet auf Windows, stattdessen kommt wie beim Steam Deck Linux zum Zuge.
Das Update auf Linux Kernel 6.7 bringt viele Neuerungen, darunter BCacheFS als neues Dateisystem. Unterstützt werden darüber hinaus Intels Meteor-Lake-iGPUs (Arc) und der Nvidia GPU System Processors (GSP). Der Support für Intel Itanium IA-64 fällt sieben Jahre nach dem Aus bei Intel weg.
Wärmepumpen sind ökologisch umso sinnvoller, je größer der Anteil erneuerbarer Energie bei der Stromerzeugung ist. In unserem Wärmepumpenbuch gibt es eine Tabelle mit Zahlen von 2021/2022. In den letzten Tagen wurden aktualisierte Zahlen für das vergangene Jahr 2023 veröffentlicht — und die sind sehr erfreulich!
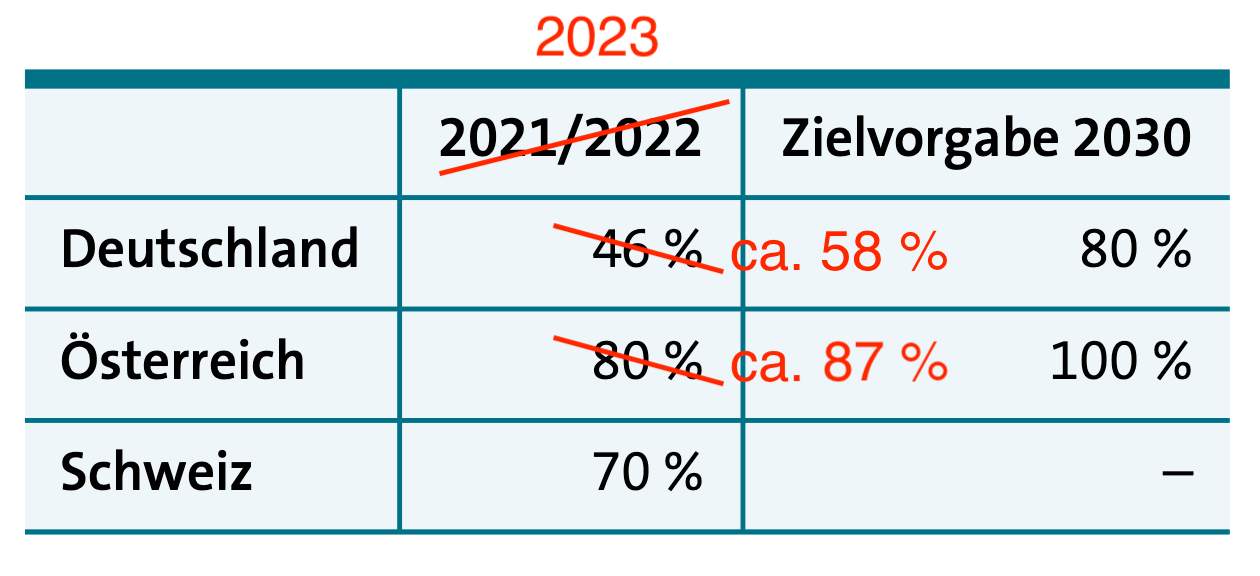
Anmerkung: Es gibt unterschiedliche Zahlen für den Anteil der erneuerbaren Energien (EE) am Strom, je nachdem, ob der Anteil relativ zur Erzeugung oder zur Nutzung des Stroms berechnet wird, ob Import/Export aus dem bzw. in das Ausland mit berücksichtigt wird und ob die betriebseigene Stromerzeugung durch eigene Kraftwerke in Bergbau, Industrie und Zugverkehr miteinberechnet wird oder nicht (dieser Strom zählt nicht zum offiziellen »Strommix«). Außerdem versorgen sich immer mehr Betriebe und Haushalte zumindest stundenweise selbst mit PV-Strom. Diese Strommengen können nicht genau erfasst werden, was eine korrekte Berechnung noch schwieriger macht. Dementsprechend variiert der EE-Anteil je nach Berechnungsmethode und Quelle ein wenig (ein bis zwei Prozent auf oder ab).
Für die Schweiz habe ich noch keine 2023er-Zahlen gefunden.
Unter dem Motto „Zeichen setzen“ finden am 16. und 17. März 2024 wieder die Chemnitzer Linux-Tage statt. Die Veranstalter hoffen wieder auf einen großen Zuspruch im Hörsaalgebäude der TU Chemnitz an der Reichenhainer Straße.
Eintrittskarten zur Veranstaltung wird es im Vorverkauf geben. Da die Anzahl der Tickets aber begrenzt ist, wird es an der Tageskasse nur Restkarten geben.
Auch 2024 haben sich die Chemnitzer Linux-Tage einen Platz an einem März-Wochenende gesucht. Also Kalender gezückt und den 16. und 17. März 2024 dick einkreisen! Es lohnt sich bestimmt.
Eintrittskarten sind an der Tageskasse erhältlich.
Wir freuen uns sehr, euch im März vor Ort in Chemnitz in gewohnter Umgebung wiederzusehen. Über unsere Pressemitteilungen, Social Media könnt ihr euch diesbezüglich auf dem Laufenden halten.
Quelle: chemnitzer.linux-tage.de
Eigentlich ist es eine kaum genutzte Funktion und irgendwie waren sie schon immer ein wenig, hmmm. Vielleicht empfinde ich es auch nur so. Aber nun sind einige soziale Netzwerke aus der Funktion Teilen aus den Blogartikeln genommen worden. Natürlich an erster Stelle das ehemalige Twitter und der Firma Meta inklusive alle Ihren Diensten. Ich glaube ... Weiterlesen
Der Beitrag Anpassen der Funktionen für das Teilen in Netzwerken erschien zuerst auf Got tty.
Ich habe mich entschlossen, die Kommentare in meinem Blog abzuschalten. Ursprung war wie immer der Frühjahrsputz in dem Blog. Hierzu habe ich eine Funktion genutzt, welche neben den Kommentaren auch die Trackbacks und Pings entfernt.Ein sehr großer Vorteil ist, dass ich die alten Kommentare hierdurch noch behalte. Früher übernahm das Plugin My Custom Functions von ... Weiterlesen
Der Beitrag PHP Code entfernt Kommentarfunktion in WordPress erschien zuerst auf Got tty.
Der Anbieter meines Virtual Private Server (VPS) führt Wartungsarbeiten durch, wodurch es in genanntem Zeitraum zu einer Downtime von ca. 45 Minuten kommen wird.
Bis neulich.
Das ist der zweite Teil einer Mini-Serie zur GPIO-Nutzung am Raspberry Pi 5:
Zu den wichtigsten Neuerungen beim Raspberry Pi 5 zählt nicht nur der viel schnellere SoC (System-on-a-Chip), sondern auch ein eigener I/O-Controller, der als eigener Chip realisiert ist (RP1). Dieser I/O-Chip bringt mit sich, dass etablierte Mechanismen zur GPIO-Steuerung nicht mehr funktionieren. Besonders stark betroffen sind Kommandos, die im Terminal oder in Bash-Scripts aufgerufen werden.
Im Verlauf eines Jahrzehnts haben sich diverse Kommandos etabliert, die mittlerweile veraltet sind. Dazu zählt das Kommando gpio aus dem WiringPi-Projekt, das bereits 2019 eingestellt wurde. Ebenfalls verabschieden müssen Sie sich von dessen Nachfolger-Kommando raspi-gpio: Das Kommando ist nicht mit dem neuen I/O-Chip RP1 kompatibel. Glücklicherweise lässt sich das Kommando relativ einfach durch pinctrl ersetzen.
Deutlich ärgerlicher ist, dass auch der beliebte Dämon pigpiod und das dazugehörende Kommando pigs der Kompatibilität zu RP1 zum Opfer gefallen ist. Absurderweise kann der Dienst Anfang 2024 im Raspberry-Pi-Konfigurationsprogramm als GPIO-Fernzugriff scheinbar weiterhin aktiviert werden.
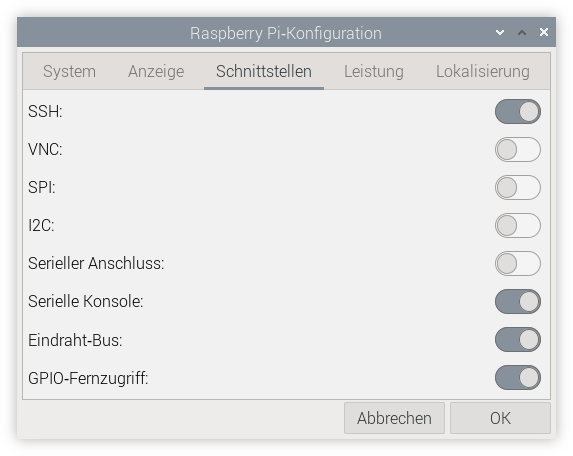
journalctl -u pigpiod beweist aber, dass der Dienst nicht funktioniert:
journalctl -u pigpiod
systemd[1]: Starting pigpiod.service - Daemon required to control GPIO pins via pigpio...
systemd[1]: Started pigpiod.service - Daemon required to control GPIO pins via pigpio.
pigpiod[88161]: 2023-12-29 11:02:24 gpioHardwareRevision: unknown rev code (d04170)
pigpiod[88161]: 2023-12-29 11:02:24 initCheckPermitted:
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: |Sorry, this system does not appear to be a raspberry pi. |
pigpiod[88161]: |aborting. |
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: Can't initialise pigpio library
systemd[1]: pigpiod.service: Main process exited, code=exited, status=1/FAILURE
systemd[1]: pigpiod.service: Failed with result 'exit-code'.
Das Problem ist bekannt, aber es sieht nicht so aus, als könnte es behoben werden: https://github.com/joan2937/pigpio/issues/589
Welche Kommandos funktionieren dann noch? Sie haben die Wahl zwischen den gpioxxx-Kommandos aus dem Paket gpiod sowie pinctrl (siehe den folgenden Abschnitt). Das Paket gpiod ist standardmäßig installiert. Die darin enthaltenen Kommandos nutzen zur Kommunikation mit dem Kernel die Device-Dateien /dev/gpiochip<n> und die Bibliothek libgpiod2.
Der größte Nachteil der Kommandos gpioget, gpioset usw. besteht darin, dass Sie als ersten Parameter die GPIO-Chip-Nummer angeben müssen. Diese variiert je nach Raspberry-Pi-Modell. Bei den Modellen der Serie 1 bis 4 müssen Sie die Nummer 0 angeben, ab Modell 5 die Nummer 4.
# LED ein- und ausschalten, die über den GPIO 7 gesteuert wird
# (= Pin 26 des J8-Headers)
# gpioset auf dem Raspberry Pi 5
gpioset 4 7=1; sleep 3; gpioset 4 7=0
# gpioset auf dem Raspberry Pi 1 bis 4
gpioset 0 7=1; sleep 3; gpioset 0 7=0
Warum variiert die GPIO-Chip-Nummer? Weil beim Raspberry Pi 4 die Kernel-Schnittstelle /dev/gpiochip0 für die GPIO-Steuerung verantwortlich ist (das sind in den BCM 2711 integrierte Funktionen), beim Pi 5 aber der RP1 (ein externer Chip) mit der Kernel-Schnittstelle /dev/gpiochip4. Informationen darüber, welche GPIO-Schnittstellen es gibt und welche GPIO-Funktion wie »verdrahtet« ist, geben die Kommandos gpiodetect und gpioinfo. Die folgenden Ausgaben gelten für den Raspberry Pi 5:
gpiodetect
gpiochip0 [gpio-brcmstb@107d508500] (32 lines)
gpiochip1 [gpio-brcmstb@107d508520] ( 4 lines)
gpiochip2 [gpio-brcmstb@107d517c00] (17 lines)
gpiochip3 [gpio-brcmstb@107d517c20] ( 6 lines)
gpiochip4 [pinctrl-rp1] (54 lines)
gpioinfo
gpiochip0 - 32 lines:
line 0: "-" unused input active-high
line 1: "2712_BOOT_CS_N" "spi10 CS0" output active-low
line 2: "2712_BOOT_MISO" unused input active-high
...
gpiochip1 - 4 lines:
line 0: "WIFI_SDIO_D0" unused input active-high
line 1: "WIFI_SDIO_D1" unused input active-high
...
gpiochip2 - 17 lines:
line 0: "RP1_SDA" unused input active-high
line 1: "RP1_SCL" unused input active-high
line 2: "RP1_RUN" "RP1 RUN pin" output active-high
...
gpiochip3 - 6 lines:
line 0: "HDMI0_SCL" unused input active-high
line 1: "HDMI0_SDA" unused input active-high
...
gpiochip4 - 54 lines:
line 0: "ID_SD" unused input active-high
line 1: "ID_SC" unused input active-high
line 2: "PIN3" unused input active-high
line 3: "PIN5" unused input active-high
line 4: "PIN7" "onewire@0" output active-high
line 5: "PIN29" "onewire@0" output active-low
line 6: "PIN31" unused input active-high
line 7: "PIN26" unused input active-high
line 8: "PIN24" unused input active-high
line 9: "PIN21" unused input active-high
line 10: "PIN19" unused input active-high
...
line 28: "PCIE_RP1_WAKE" unused input active-high
line 29: "FAN_TACH" unused input active-high
line 30: "HOST_SDA" unused input active-high
line 31: "HOST_SCL" unused input active-high
line 32: "ETH_RST_N" "phy-reset" output active-low
...
Um Scripts zu programmieren, die universell funktionieren, können Sie die folgenden Zeilen in den Code einbauen:
# chip=4 für RPi5, chip=0 für ältere Modelle
if gpiodetect | grep -q "pinctrl-rp"; then
chip=4
else
chip=0
fi
In der einfachsten Form schalten Sie mit gpioset einen GPIO-Ausgang auf High oder Low. In den folgenden Beispielen bezieht sich der erste Parameter auf die gpiochip-Nummer. 7 gibt die GPIO-Nummer in BCM-Nomenklatur an, 1 oder 0 den gewünschten Zustand:
gpioset $chip 7=1 # GPIO 7 (Pin 26) auf High stellen
gpioset $chip 7=0 # GPIO 7 (Pin 26) auf Low stellen
Sie können auch mehrere Ausgänge auf einmal steuern (hier GPIO 7, 8 und 25):
gpioset $chip 7=0 8=1 25=0
Durch diverse Optionen können Sie weitere Funktionen steuern (siehe auch man gpioset):
--bias=as-is|disable|pull-down|pull-up aktiviert die internen Pull-up- oder Pull-down-Widerstände.
--mode=exit|wait|time|signal gibt an, wie lange das Kommando laufen soll. Standardmäßig gilt exit, das Kommando wird also sofort beendet. Mit wait wartet das Programm, bis der Benutzer [Return] drückt. Bei der Einstellung time können Sie mit --sec=<n> oder --usec=<n> die gewünschte Wartezeit einstellen. signal bedeutet, dass das Programm weiterläuft, bis es mit [Strg]+[C] beendet wird.
--background führt das Kommando als Hintergrunddienst weiter.
gpioget funktioniert analog zu gpioset: Sie übergeben im ersten Parameter die gpiochip-Nummer (in aller Regel 0), im zweiten Parameter die BCM-Nummer des GPIOs, dessen Input Sie auswerten wollen. Das Ergebnis des Kommandos lautet 0 oder 1, je nachdem, welchen Zustand der Eingang hat.
gpioget $chip 9 # Zustand von GPIO 9 (Pin 21) auslesen
0
Auch mit pinctrl aus dem Paket raspi-utils können Sie GPIO-Funktionen steuern. Der Vorteil von pinctrl besteht darin, dass das Kommando zur Zeit mit allen Raspberry-Pi-Modellen kompatibel ist. Eine Fallunterscheidung, ob das Script auf einem alten oder neuen Modell mit RP1-Chip läuft, entfällt. Außerdem ist das Kommando syntaktisch weitestgehend zu raspi-gpio kompatibel.
Gegen den Einsatz des Kommandos spricht der Umstand, dass das Kommando laut pinctrl -h (der einzigen mir bekannten Dokumentation) nur für Debugging-Zwecke gedacht ist.
Die folgende Aufzählung fasst die wichtigsten Anwendungen des Kommandos zusammen:
pinctrl get [gpionr] ermittelt den aktuellen Status aller GPIOs bzw. des angegebenen GPIOs.
pinctrl funcs [gpionr] ermittelt, welche alternativen Funktionen der angegebene GPIO bzw. alle GPIOs erfüllen können.
pinctrl set gpionr options verändert den Status des angegeben GPIOs. Mögliche Optionen sind:
ip = Inputop = Outputdl = Zustand Low (Drive Low)dh = Zustand High (Drive High)pu = Pull-up-Widerstand aktivpd = Pull-down-Widerstand aktivpn = keine Pull-up/down-Funktiona0 bis a7 = alternative Funktion n aktivierenno = Deaktivieren (no function)Soweit sich sinnvolle Kombinationen ergeben, dürfen mehrere der obigen Optionen auf einmal übergeben werden, jeweils getrennt durch Leerzeichen. Welche alternative Funktionen ein GPIO unterstützt und wie sie nummeriert sind, geht aus pinctrl funcs hervor.
Das folgende Kommando ermittelt, welche Funktionen der GPIO mit der BCM-Nummer 23 unterstützt. Auf dem Raspberry Pi ist dieser GPIO mit Pin 16 des J8-Headers verbunden. GPIO23 kann diverse Funktionen übernehmen:
pinctrl funcs 23
23, PIN16/GPIO23, SD0_CMD, DPI_D19, I2S0_SDO1, SCL3,
I2S1_SDO1, SYS_RIO023, PROC_RIO023, PIO23
Wenn Sie über Pin 26 (BCM-Nummer 07) eine Leuchtdiode angeschlossen haben, dann können Sie die LED wie folgt ein- und ausschalten:
pinctrl set 7 op dh # LED an Pin 26 ein
pinctrl set 7 op dl # LED an Pin 26 aus