Heute möchte ich noch einmal ein Thema aus der Mottenkiste holen, welches ja eigentlich schon abgehakt sein sollte. Es geht um das Upgrade von Raspbian 10 auf das Raspberry Pi OS 11.
Anlass des Ganzen ist unsere Community-Cloud mit über 25 Nutzern. Diese Cloud wurde vor über fünfeinhalb Jahren zum Zwecke des Datenteilens ins Leben gerufen. Durch einen bedingten öfteren Standortwechsel verblieb das System auf einem Softwarestand von vor über zwei Jahren. Jetzt im neuen Zuhause stand dadurch ein gründlicher Tapetenwechsel an. D.h., dass im ersten Schritt das Betriebssystem auf Raspberry Pi OS 11 Bullsleye angehoben werden musste, bevor die Nextcloud von Version 22 auf 27 aktualisiert wurde. Weiterhin musste parallel PHP 7.3 auf Version 8.1 gezogen werden, um wieder in sicheres Fahrwasser zu gelangen. Bei der Hardware handelt es sich um einen Raspberry Pi 3 Model B. Auch dieses Gerät soll im laufe des Jahres noch ein Refresh erhalten.
Nun zum Upgrade auf das erwähnte Raspberry Pi OS 11.
Installation
Hilfreich bei der Installation war die Anleitung von linuxnews.de, die ich abschließend noch um zwei Punkte ergänzen musste. Hierbei konnte ich mich noch an mein erstes Upgrade dieser Art erinnern, dass es zu Unverträglichkeiten mit dem Desktop kam. Dieses Problem wird ganz am Ende des Artikels behandelt.
Zuerst wurde ein vollständiges Upgrade auf die aktuellste Version Raspbian 10 durchgeführt.
Danach wurden unnötige Pakete und verbliebene heruntergeladene Pakete entfernt.
sudo apt autoremove
sudo apt clean
Nun mussten noch die Kernelbased Mode-Setting (KMS) in der /boot/config.txt angepasst werden. Hierzu wurden folgende zwei Befehle ausgeführt:
sudo sed -i 's/dtoverlay=vc4-fkms-v3d/#dtoverlay=vc4-fkms-v3d/g' /boot/config.txt
sudo sed -i 's/\[all\]/\[all\]\ndtoverlay=vc4-kms-v3d/' /boot/config.txt
Desktop aufräumen
Nach dem Reboot mit angeschlossenem Monitor fiel auf, dass sich das Programm Parcellite in der Menüleiste verewigt hatte. Parcellite war vor dem Systemupgrade auf Raspberry Pi OS 11 Bullseye nicht an Bord. Aus diesem Grund konnte es auch ohne Bedenken gelöscht werden.
sudo apt remove parcellite
Weiterhin fiel auf, dass die ganze Menüleiste des Desktops etwas vermurkst aussah. Diese wurde auf die Grundeinstellungen mit
cd ~/
sudo rm -rf .cache
zurückgesetzt.
Nach einem erneuten Reboot läuft Raspberry Pi OS 11 wie gewünscht.
sudo reboot
Nextcloud 27 – Raspberry Pi Modell B Rev 1.2Nextcloud 27 – PHP 8.1
Fazit
Um unsere Community-Cloud wieder sicher zu machen, war ein wenig Wochenendarbeit nötig. Die so investierte Zeit hat sich aber durchaus gelohnt. Im nächsten Schritt erfolgt dann der Tausch des Raspberry Pi und ein Wechsel der Daten-SSD gegen ein größeres Modell.
Ein MQTT-Broker ist die Schnittstelle zwischen vielen IoT-Sensoren und Geräten, die Sensordaten auswerten oder Aktoren steuern. Das MQTT-Protokoll ist offen und sehr weit verbreitet. Es findet in der Industrie Anwendungen, ist aber auch in Smart Homes ist MQTT weit verbreitet. MQTT ist ein sehr schlankes und schnelles Protokoll. Es wird in Anwendungen mit niedriger Bandbreite gerne angewendet.
MQTT funktioniert, grob gesagt, folgendermaßen: IoT-Geräte können Nachrichten versenden, die von anderen IoT-Geräten empfangen werden. Die Vermittlungsstelle ist ein sogenannter MQTT-Broker. Dieser empfängt die Nachrichten von den Clients. Gleichzeitig können diese Nachrichten von anderen Clients abonniert werden. Die Nachrichten werden in sog. Topics eingestuft, die hierarchisch angeordnet sind, z.B. Wohnzimmer/Klima/Luftfeuchtigkeit.
Home Assistant, oder ein anderer Client, kann diesen Topic abonnieren und den Nachrichteninhalt („Payload„) auswerten (z.B. 65%).
Home Assistant OS vs. Home Assistant Container
In Home Assistant OS und Supervisor gibt es ein Addon, das einen MQTT-Broker installiert. Das ist sehr einfach, komfortabel und funktioniert wohl recht zurverlässig. In den Installationsarten Home Assistant Container und Core gibt es diese Möglichkeit nicht. Hier muss man manuell einen MQTT-Broker aufsetzen.
In diesem Artikel beschäftige ich mich damit, wie man den MQTT-Brocker Mosquitto über Docker installiert. Anschließend zeige ich, wie man die Konfigurationsdatei gestaltet und eine Verbindung zu Home Assistant herstellt. Das Ergebnis ist dann ungefähr so, als hätte man das Addon installiert. Los gehts!
Schritt für Schritt: MQTT-Broker Mosquitto mit Docker installieren
Als MQTT-Broker verwende ich die weit verbreitete Software Mosquitto von Eclipse. Dieser wird auch von Home Assistant bevorzugt und ist derjenige Broker, den das Addon installieren würde. Für diese Anleitung wird vorausgesetzt, dass Docker bereits installiert ist und eine SSH-Verbindung zum Server hergestellt werden kann.
Schritt 1: Zunächst erstellen wir ein paar Ordner, die wir später benötigen. Mosquitto wird später so konfiguriert, dass in diese Ordner alle wichtigen Dateien abgelegt werden. Dadurch kann man auf dem Filesystem des Servers Mosquitto konfigurieren und beobachten.
-p 1883:1883 Der genannte Port ist die Standardeinstellung für MQTT. Alles was auf diesen Port am Server ankommt, wird in den Mosquitto-Container geleitet.
-p 9001:9001 Über diesen Port laufen die Websocket-Anwendungen. Falls das nicht benötigt wird, kann man das weg lassen
name mosquitto Über diesen kurzen Namen können wir den Docker-Container steuern
-v <filesystem-Pfad>:<Container-Pfad> Die in Schritt 1 erstellten Ordner werden in den Container eingebunden
Wer lieber Docker Compose verwendet, trägt diesen Eintrag in seine *.yaml ein:
Schritt 5: Checken, ob der Container ordnungsgemäß läuft. In der folgenden Liste sollte eine Zeile mit dem Mosquitto-Docker auftauchen. Dieser sollte außerdem „up“ sein. Falls nicht, nochmal versuchen den Container zu starten und kontrollieren, ob er läuft.
$ docker container ls -a
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
xxxxxxxxx eclipse-mosquitto "/init" 3 minutes ago Up 2 minutes [...] mosquitto
Schritt 6: Sehr gut, der Container läuft. Es wird dringend empfohlen, den MQTT-Broker so abzusichern, dass nur angemeldete User darauf zugreifen können. Das ist ja schon in Schritt 2 in die Konfigurationsdatei geschrieben worden. Mit dem folgenden Befehl melden wir uns in der Shell innerhalb des Containers an und erstellen einen Benutzer. In diesem Beispiel mosquitto. Im Anschluss an diesen Befehl wird man zweimal gebeten, das Passwort für den User festzulegen. Ist das geschafft, läuft der MQTT-Broker auf dem Server. Herzlichen Glückwunsch!
$ docker exec -it mosquitto sh // öffnet die Shell innerhalb des Dockers mosquitto_passwd -c /mosquitto/config/mosquitto.passwd mosquitto
Optional Schritt 7: Den MQTT-Broker bindet man in Home Assistant ein, indem man auf Einstellungen → Geräte und Dienste → + Integration hinzufügen klickt. Im Suchfenster nach „MQTT“ suchen und die Zugangsdaten eingeben. Die Server-Adresse findet man übrigens am schnellsten über ifconfig heraus.
BunsenLabs ist eine minimalistische Distribution auf Debian-Basis mit Openbox als Fenster-Manager. Das aktuelle BunsenLabs »Boron« ist allemal einen Blick wert.
Selten bleibt eine Anwendung so lange verborgen wie der japanische Firefox-Ableger Floorp. Der auf Firefox ESR basierende Browser bietet guten Datenschutz und viel Einfluss auf Aussehen und Handhabung.
Mit MX Linux 23.2 veröffentlichen die Entwickler das zweite Erhaltungs-Release von MX Linux 23 »Libretto«. Es basiert auf Debian 12 und führt PipeWire 1.0 ein.
Mit Firefox 122 bietet der Mozilla-Browser eine stabilere Übersetzungsfunktion sowie Unterstützung für Passkeys. Erstmals wird auch offiziell ein Debian-Paket angeboten.
Die auf Debian basierende Linux-Distribution DietPi wird monatlich aktualisiert. Das Release 9.0 für den Monat Januar wird erst ab Debian 11 »Bullseye« unterstützt.
Mit der kostenlosen Open Source Lösung unbox.at schützt du deinen Posteingang mit E-Mail-Aliasnamen. Antworte anonym auf weitergeleitete E-Mails. Der Absender erhält die E-Mail so, als käme sie von deinem Alias. Oder starte eine Konversation direkt von deinem Alias aus.
Das Betreiben der Dienste, Webseite und Server machen wir gerne, kostet aber leider auch Geld.
Unterstütze unsere Arbeit mit einer Spende und diskutiere ins unserem Chat mit.
Noch rund 40 Tage verbleiben bis zum geplanten Release von Plasma 6. Die Planung und Ausführung erscheinen fast generalstabsmäßig und lassen einen nahtlosen Übergang erwarten.
Genau genommen hat die Kamera-Nutzung nicht unmittelbar etwas mit GPIOs zu tun. Allerdings ist für die Kommunikation mit der Kamera ebenfalls der neu im Pi 5 integrierte RP1-Chip verantwortlich. Der Chip ist der Grund, weswegen alte Kamera-Tools auf dem Raspberry Pi 5 nicht mehr funktionieren. Bevor Sie zu schimpfen beginnen: Der RP1 hat viele Vorteile. Unter anderem können Sie nun zwei Kameras gleichzeitig anschließen und nutzen und höhere Datenmengen übertragen (wichtig für Videos).
Beachten Sie, dass Sie beim Raspberry Pi 5 zum Kamera-Anschluss ein neues, schmaleres Kabel benötigen!
Kamera-Modul 3 mit einem neuen Anschlusskabel mit schmaler Kontaktleiste
Veraltet: raspistill, raspivid, picamera2
Im Terminal bzw. in Bash-Scripts funktionieren raspistill, raspivid usw. nicht mehr. Sie müssen stattdessen rpicam-still, rpicam-vid etc. einsetzen.
In Python-Scripts müssen Sie Abschied vom picamera-Modul nehmen. Stattdessen gibt es das vollkommen neue Modul Picamera2. Es bietet (viel) mehr Funktionen, ist aber in der Programmierung komplett inkompatibel. Vorhandene Scripts können nicht portiert werden, sondern müssen neu entwickelt werden.
Sowohl die rpicam-xxx-Kommandos als auch das Picamera2-Modul greifen auf die ebenfalls neue Bibliothek libcamera2 zurück.
Im einfachsten Anwendungsfall erzeugen Sie ein Picamera2-Objekt, machen mit der Methode start_and_capture_file ein Foto und speichern dieses in eine Datei. Dabei kommt die volle Auflösung der Kamera zur Anwendung, beim Camera Module 3 immerhin fast 4600×2600 Pixel.
#!/usr/bin/env python3
# Beispieldatei camera.py
from picamera2 import Picamera2
cam = Picamera2()
# ein Foto machen und speichern
cam.start_and_capture_file("test.jpg")
Anstelle von start_and_capture_file gibt es zwei weitere Methoden, um ebenso unkompliziert Bilderfolgen bzw. Videos aufzunehmen:
# 10 Bilder im Abstand von 0,5 Sekunden aufnehmen
# mit Dateinamen in der Form series-0003.jpg
cam.start_and_capture_files("series-{:0>4d}.jpg",
num_files=10,
delay=0.5)
# Video über 10 Sekunden aufnehmen (640x480 @ 30 Hz, H.264/AVC1)
cam.start_and_record_video("test.mp4", duration=10)
rpicam-xxx-Kommandos
Zum Test der Kamera sowie zur Aufnahme von Bildern und Videos stehen die folgenden neuen Kommandos zur Auswahl:
rpicam-hello: zeigt für fünf Sekunden der Preview-Fenster mit dem Bild der Kamera an
rpicam-jpeg: nimmt ein Foto auf und speichert es als JPEG-Datei
rpicam-still: nimmt ein Foto auf und speichert es (mehr Optionen als rpicam-jpeg, Optionen etwas kompatibler zu raspistill)
rpicam-vid: nimmt ein Video auf und speichert es oder gibt den Video-Stream an externe Tools (livav/ffmpeg) weiter
rpicam-raw: speichert RAW-Videomaterial in einer Datei
Die Kommandos sind mit all ihren Optionen großartig dokumentiert. Es gibt zwar keine man-Seiten, aber dafür liefern die Kommandos mit der Option -h eine lange Liste aller Optionen (z.B. rpicam-still -h). Ich beschränke mich hier auf einige einfache Anwendungsbeispiele.
# fünf Sekunden lang ein Vorschaufenster anzeigen, dann
# ein Foto aufnehmen und speichern
rpicam-jpeg -o image.jpg
# ohne Vorschau, Aufnahme nach einer Sekunde (1000 ms)
rpicam-jpeg -n -t 1000 -o image.jpg
# wie oben, aber Debugging-Ausgaben nicht anzeigen
rpicam-jpeg -n -t 1000 -v 0 -o image.jpg
# Bildgröße 1280x800
rpicam-jpeg --width 1280 --height 800 -o image.jpg
# heller/dunkler (EV Exposure Compensation)
rpicam-jpeg --ev 0.5 -o brighter.jpg
rpicam-jpeg --ev -0.5 -o darker.jpg
# erstellt ein 10 Sekunden langes Video (10.000 ms)
# 640x480@30Hz, H264-Codec
rpicam-vid -t 10000 -o test.mp4
# wie vorher, aber höhere Auflösung
rpicam-vid --width 1024 --height 768 -t 10000 -o test.mp4
Falls Sie mehr als eine Kamera angeschlossen haben, können Sie diese mit rpicam-hello --list-cameras auflisten. Die bei einer Aufnahme gewünschte Kamera können Sie mit der Option rpicam-xxx --camera <n> festlegen.
picamera2-Modul für Python-Scripts
picamera2 ist ein relativ neues Python-Modul. Es ersetzt das früher gebräuchliche Modul picamera. Der Hauptvorteil von picamera2 besteht darin, dass das Modul zu aktuellen Raspberry-Pi-Modellen kompatibel ist. Beim Raspberry Pi 5 kommt picamera2 auch mit dem Fall zurecht, dass Sie zwei Kameras gleichzeitig an Ihren Minicomputer angeschlossen haben.
Eine umfassende Referenz aller Klassen und Methoden finden Sie in der exzellenten Dokumentation (nur im PDF-Format verfügbar), die allerdings weit mehr technische Details behandelt, als Sie jemals brauchen werden. Eine Menge Beispiel-Scripts finden Sie auf GitHub.
Mit create_still_configuration können Sie in diversen optionalen Parametern Einstellungen vornehmen. Das resultierende Konfigurationsobjekt übergeben Sie dann an die configure-Methode. Wichtig ist, dass Sie das Foto nicht mit start_and_capture_file aufnehmen, sondern dass Sie die Methoden start und capture_file getrennt ausführen. Die folgenden Zeilen zeigen, wie Sie ein Bild in einer Auflösung von 1024×768 Pixel aufnehmen. Die sleep-Aufforderung verbessert die Qualität des Bilds. Sie gibt der Kamera-Software etwas Zeit, um die Aufnahme zu fokussieren und richtig zu belichten.
#!/usr/bin/env python3
from picamera2 import Picamera2, Preview
import time
# ein Foto in reduzierter Auflösung aufnehmen
cam = Picamera2()
myconfig = cam.create_still_configuration(
main={"size": (1024, 768)} )
cam.configure(myconfig)
cam.start()
time.sleep(0.5)
cam.capture_file("1024x768.jpg")
Mit Transformationen können Sie das aufgenommene Bild vertikal und horizontal spiegeln. Falls Sie die Kamerakonfiguration während der Ausführung eines Scripts ändern möchten, müssen Sie die Kamera vorher stoppen und danach neu starten.
Bei der Aufnahme von Videos haben Sie die Wahl zwischen drei Encodern, die die aufgenommenen Bilder in Video-Dateien umzuwandeln:
H264Encoder (Hardware-Encoder für H.264, kommt per Default zum Einsatz, max. 1080p@30 Hz)
MJPEGEncoder (Hardware-Encoder für Motion JPEG = MJPEG)
JpegEncoder (Software-Encoder für MJPEG)
Hardware-Encoding steht nur auf dem Raspberry Pi 4 (H.264 und MJPEG) und dem Raspberry Pi 5 (nur H.264) zur Verfügung. Beim Raspberry Pi 5 läuft der MJPEGEncoder also per Software.
Das folgenden Script soll ein Video im Format 720p aufnehmen und gleichzeitig ein Vorschaubild anzeigen. Dabei soll der H.264-Codec eingesetzt werden.
Das Script zeigt zwar keine Fehlermeldungen an, allerdings lässt sich die Video-Datei nicht abspielen, weder mit VLC am Raspberry Pi noch mit anderen Video-Playern auf anderen Rechnern. Ich habe tagelang mit den Video-Funktionen von Picamera2 experimentiert, aber die resultierenden Videos waren meist schwarz oder enthielten nur ein Bild, das am Beginn der Aufnahme entstanden ist. Auch die auf der folgenden Seite gesammelten Beispiel-Scripts zum Video-Recording funktionierten bei meinen Tests entweder gar nicht oder nur mit Einschränkungen:
Fazit: Die Video-Funktionen von Picamera2 sind aktuell (Anfang 2024) ebenso ambitioniert wie unausgereift. Es ist zu hoffen, dass neue Versionen von libcamera und Picamera2 und eine bessere Dokumentation der Grundfunktionen in Zukunft Abhilfe schaffen. Was nützen coole Spezial-Features, wenn es schon bei den einfachsten Grundfunktionen Probleme gibt?
Flathub ist die größte Plattform zum Entdecken und Herunterladen von Flatpaks. Das schnelle Wachstum der Plattform brachte aber auch Probleme mit sich.
Noch 42 Tage verbleiben bis zur Veröffentlichung von Plasma 6. Das neue Wallpaper wurde gekürt und das Ziel der Spendenkampagne bereits jetzt übertroffen.
Das Jahr 2024 ist nun schon zwei Wochen alt. Dennoch möchte ich noch einen Blick zurückwerfen und mich erinnern, wie das Jahr 2023 für meinen Blog verlaufen ist.
In 2023 wurden auf My-IT-Brain insgesamt 45 Artikel veröffentlicht. Dies sind 16 mehr als in 2022 und 14 mehr als in 2021. Jeden Monat sind mindestens zwei Artikel veröffentlicht worden.
Die Themen waren dabei wieder bunt gemischt. Allein Artikel über die Red Hat Enterprise Linux (RHEL) System Roles zogen sich wie ein roter Faden durch den Blog. Welche Artikel haben denn euch am besten gefallen? Lasst es mich gerne in den Kommentaren wissen.
Ich hoffe, es war für jeden von euch etwas Interessantes mit dabei und ihr folgt diesem Blog auch in 2024. Ihr könnt mir auch gerne Anregungen in die Kommentare schreiben, welche Themen ihr hier gerne behandelt sehen wollt. Vielleicht greife ich ja einige davon auf.
Ayaneo erweitert das zuletzt durch die Bank weg kostspielige Portfolio an Gaming-Handhelds um ein günstigeres Modell, das ab 299 USD zu haben ist. Das Ayaneo Next Lite setzt zu diesem Zweck auf eine vier Jahre alte Ryzen-Plattform und verzichtet auf Windows, stattdessen kommt wie beim Steam Deck Linux zum Zuge.
Das Update auf Linux Kernel 6.7 bringt viele Neuerungen, darunter BCacheFS als neues Dateisystem. Unterstützt werden darüber hinaus Intels Meteor-Lake-iGPUs (Arc) und der Nvidia GPU System Processors (GSP). Der Support für Intel Itanium IA-64 fällt sieben Jahre nach dem Aus bei Intel weg.
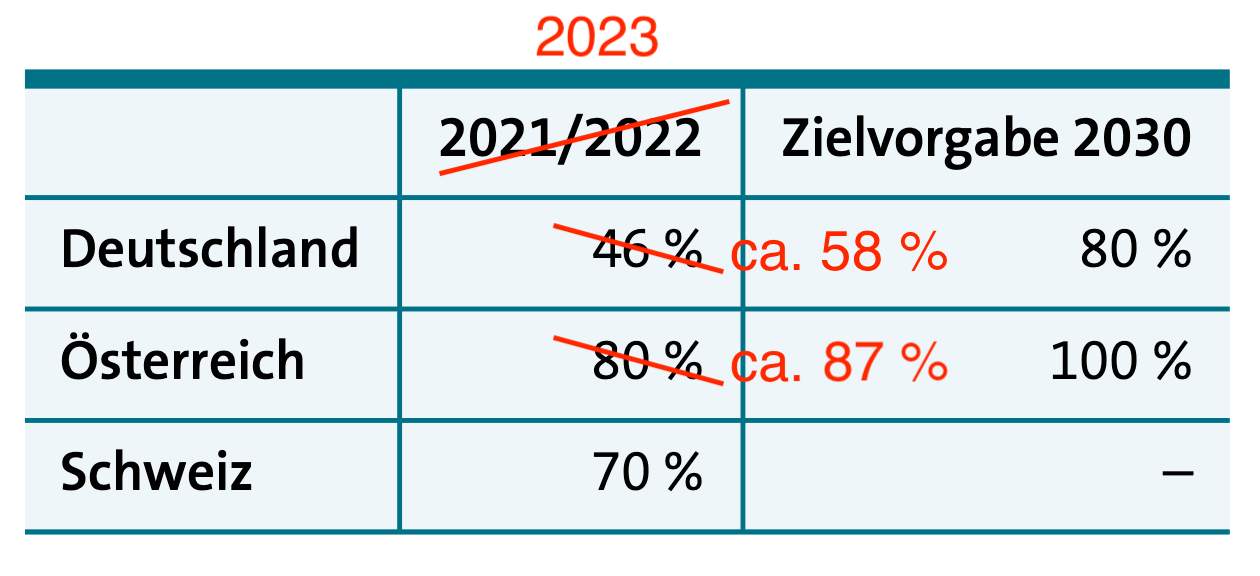
Wärmepumpen sind ökologisch umso sinnvoller, je größer der Anteil erneuerbarer Energie bei der Stromerzeugung ist. In unserem Wärmepumpenbuch gibt es eine Tabelle mit Zahlen von 2021/2022. In den letzten Tagen wurden aktualisierte Zahlen für das vergangene Jahr 2023 veröffentlicht — und die sind sehr erfreulich!
Anteil erneuerbarer Energien an der Stromerzeugung
Anmerkung: Es gibt unterschiedliche Zahlen für den Anteil der erneuerbaren Energien (EE) am Strom, je nachdem, ob der Anteil relativ zur Erzeugung oder zur Nutzung des Stroms berechnet wird, ob Import/Export aus dem bzw. in das Ausland mit berücksichtigt wird und ob die betriebseigene Stromerzeugung durch eigene Kraftwerke in Bergbau, Industrie und Zugverkehr miteinberechnet wird oder nicht (dieser Strom zählt nicht zum offiziellen »Strommix«). Außerdem versorgen sich immer mehr Betriebe und Haushalte zumindest stundenweise selbst mit PV-Strom. Diese Strommengen können nicht genau erfasst werden, was eine korrekte Berechnung noch schwieriger macht. Dementsprechend variiert der EE-Anteil je nach Berechnungsmethode und Quelle ein wenig (ein bis zwei Prozent auf oder ab).
Für die Schweiz habe ich noch keine 2023er-Zahlen gefunden.
Unter dem Motto „Zeichen setzen“ finden am 16. und 17. März 2024 wieder die Chemnitzer Linux-Tage statt. Die Veranstalter hoffen wieder auf einen großen Zuspruch im Hörsaalgebäude der TU Chemnitz an der Reichenhainer Straße.
Eintrittskarten zur Veranstaltung wird es im Vorverkauf geben. Da die Anzahl der Tickets aber begrenzt ist, wird es an der Tageskasse nur Restkarten geben.
Auch 2024 haben sich die Chemnitzer Linux-Tage einen Platz an einem März-Wochenende gesucht. Also Kalender gezückt und den 16. und 17. März 2024 dick einkreisen! Es lohnt sich bestimmt.
Wir freuen uns sehr, euch im März vor Ort in Chemnitz in gewohnter Umgebung wiederzusehen. Über unsere Pressemitteilungen, Social Media könnt ihr euch diesbezüglich auf dem Laufenden halten.
Eigentlich ist es eine kaum genutzte Funktion und irgendwie waren sie schon immer ein wenig, hmmm. Vielleicht empfinde ich es auch nur so. Aber nun sind einige soziale Netzwerke aus der Funktion Teilen aus den Blogartikeln genommen worden. Natürlich an erster Stelle das ehemalige Twitter und der Firma Meta inklusive alle Ihren Diensten. Ich glaube ... Weiterlesen