Arch Linux wechselt zu Dbus-Broker
10. Januar 2024 um 10:14
D-Bus ist in die Jahre gekommen und Versuche, einen Ersatz in den Kernel zu heben, sind gescheitert. Arch Linux folgt Fedora und wechselt jetzt zu Dbus-Broker.
D-Bus ist in die Jahre gekommen und Versuche, einen Ersatz in den Kernel zu heben, sind gescheitert. Arch Linux folgt Fedora und wechselt jetzt zu Dbus-Broker.
Unter dem Motto „Zeichen setzen“ finden am 16. und 17. März 2024 wieder die Chemnitzer Linux-Tage statt. Die Veranstalter hoffen wieder auf einen großen Zuspruch im Hörsaalgebäude der TU Chemnitz an der Reichenhainer Straße.
Eintrittskarten zur Veranstaltung wird es im Vorverkauf geben. Da die Anzahl der Tickets aber begrenzt ist, wird es an der Tageskasse nur Restkarten geben.
Auch 2024 haben sich die Chemnitzer Linux-Tage einen Platz an einem März-Wochenende gesucht. Also Kalender gezückt und den 16. und 17. März 2024 dick einkreisen! Es lohnt sich bestimmt.
Eintrittskarten sind an der Tageskasse erhältlich.
Wir freuen uns sehr, euch im März vor Ort in Chemnitz in gewohnter Umgebung wiederzusehen. Über unsere Pressemitteilungen, Social Media könnt ihr euch diesbezüglich auf dem Laufenden halten.
Quelle: chemnitzer.linux-tage.de
Linus Torvalds hat gestern mit Linux 6.7 einen der größten Kernel überhaupt freigegeben. Nach mehreren Anläufen wurde Bcachefs in Mainline aufgenommen.
Das ist der zweite Teil einer Mini-Serie zur GPIO-Nutzung am Raspberry Pi 5:
Zu den wichtigsten Neuerungen beim Raspberry Pi 5 zählt nicht nur der viel schnellere SoC (System-on-a-Chip), sondern auch ein eigener I/O-Controller, der als eigener Chip realisiert ist (RP1). Dieser I/O-Chip bringt mit sich, dass etablierte Mechanismen zur GPIO-Steuerung nicht mehr funktionieren. Besonders stark betroffen sind Kommandos, die im Terminal oder in Bash-Scripts aufgerufen werden.
Im Verlauf eines Jahrzehnts haben sich diverse Kommandos etabliert, die mittlerweile veraltet sind. Dazu zählt das Kommando gpio aus dem WiringPi-Projekt, das bereits 2019 eingestellt wurde. Ebenfalls verabschieden müssen Sie sich von dessen Nachfolger-Kommando raspi-gpio: Das Kommando ist nicht mit dem neuen I/O-Chip RP1 kompatibel. Glücklicherweise lässt sich das Kommando relativ einfach durch pinctrl ersetzen.
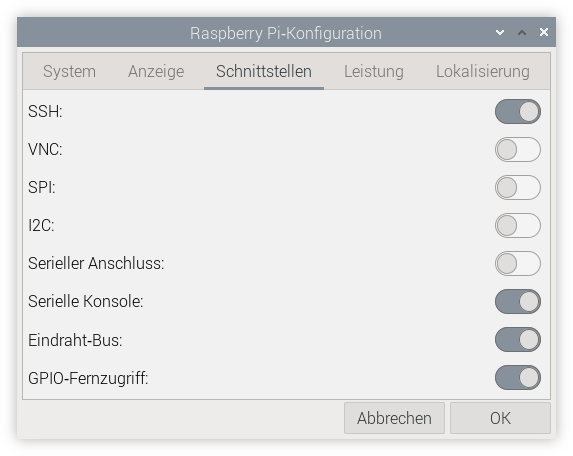
Deutlich ärgerlicher ist, dass auch der beliebte Dämon pigpiod und das dazugehörende Kommando pigs der Kompatibilität zu RP1 zum Opfer gefallen ist. Absurderweise kann der Dienst Anfang 2024 im Raspberry-Pi-Konfigurationsprogramm als GPIO-Fernzugriff scheinbar weiterhin aktiviert werden.
journalctl -u pigpiod beweist aber, dass der Dienst nicht funktioniert:
journalctl -u pigpiod
systemd[1]: Starting pigpiod.service - Daemon required to control GPIO pins via pigpio...
systemd[1]: Started pigpiod.service - Daemon required to control GPIO pins via pigpio.
pigpiod[88161]: 2023-12-29 11:02:24 gpioHardwareRevision: unknown rev code (d04170)
pigpiod[88161]: 2023-12-29 11:02:24 initCheckPermitted:
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: |Sorry, this system does not appear to be a raspberry pi. |
pigpiod[88161]: |aborting. |
pigpiod[88161]: +---------------------------------------------------------+
pigpiod[88161]: Can't initialise pigpio library
systemd[1]: pigpiod.service: Main process exited, code=exited, status=1/FAILURE
systemd[1]: pigpiod.service: Failed with result 'exit-code'.
Das Problem ist bekannt, aber es sieht nicht so aus, als könnte es behoben werden: https://github.com/joan2937/pigpio/issues/589
Welche Kommandos funktionieren dann noch? Sie haben die Wahl zwischen den gpioxxx-Kommandos aus dem Paket gpiod sowie pinctrl (siehe den folgenden Abschnitt). Das Paket gpiod ist standardmäßig installiert. Die darin enthaltenen Kommandos nutzen zur Kommunikation mit dem Kernel die Device-Dateien /dev/gpiochip<n> und die Bibliothek libgpiod2.
Der größte Nachteil der Kommandos gpioget, gpioset usw. besteht darin, dass Sie als ersten Parameter die GPIO-Chip-Nummer angeben müssen. Diese variiert je nach Raspberry-Pi-Modell. Bei den Modellen der Serie 1 bis 4 müssen Sie die Nummer 0 angeben, ab Modell 5 die Nummer 4.
# LED ein- und ausschalten, die über den GPIO 7 gesteuert wird
# (= Pin 26 des J8-Headers)
# gpioset auf dem Raspberry Pi 5
gpioset 4 7=1; sleep 3; gpioset 4 7=0
# gpioset auf dem Raspberry Pi 1 bis 4
gpioset 0 7=1; sleep 3; gpioset 0 7=0
Warum variiert die GPIO-Chip-Nummer? Weil beim Raspberry Pi 4 die Kernel-Schnittstelle /dev/gpiochip0 für die GPIO-Steuerung verantwortlich ist (das sind in den BCM 2711 integrierte Funktionen), beim Pi 5 aber der RP1 (ein externer Chip) mit der Kernel-Schnittstelle /dev/gpiochip4. Informationen darüber, welche GPIO-Schnittstellen es gibt und welche GPIO-Funktion wie »verdrahtet« ist, geben die Kommandos gpiodetect und gpioinfo. Die folgenden Ausgaben gelten für den Raspberry Pi 5:
gpiodetect
gpiochip0 [gpio-brcmstb@107d508500] (32 lines)
gpiochip1 [gpio-brcmstb@107d508520] ( 4 lines)
gpiochip2 [gpio-brcmstb@107d517c00] (17 lines)
gpiochip3 [gpio-brcmstb@107d517c20] ( 6 lines)
gpiochip4 [pinctrl-rp1] (54 lines)
gpioinfo
gpiochip0 - 32 lines:
line 0: "-" unused input active-high
line 1: "2712_BOOT_CS_N" "spi10 CS0" output active-low
line 2: "2712_BOOT_MISO" unused input active-high
...
gpiochip1 - 4 lines:
line 0: "WIFI_SDIO_D0" unused input active-high
line 1: "WIFI_SDIO_D1" unused input active-high
...
gpiochip2 - 17 lines:
line 0: "RP1_SDA" unused input active-high
line 1: "RP1_SCL" unused input active-high
line 2: "RP1_RUN" "RP1 RUN pin" output active-high
...
gpiochip3 - 6 lines:
line 0: "HDMI0_SCL" unused input active-high
line 1: "HDMI0_SDA" unused input active-high
...
gpiochip4 - 54 lines:
line 0: "ID_SD" unused input active-high
line 1: "ID_SC" unused input active-high
line 2: "PIN3" unused input active-high
line 3: "PIN5" unused input active-high
line 4: "PIN7" "onewire@0" output active-high
line 5: "PIN29" "onewire@0" output active-low
line 6: "PIN31" unused input active-high
line 7: "PIN26" unused input active-high
line 8: "PIN24" unused input active-high
line 9: "PIN21" unused input active-high
line 10: "PIN19" unused input active-high
...
line 28: "PCIE_RP1_WAKE" unused input active-high
line 29: "FAN_TACH" unused input active-high
line 30: "HOST_SDA" unused input active-high
line 31: "HOST_SCL" unused input active-high
line 32: "ETH_RST_N" "phy-reset" output active-low
...
Um Scripts zu programmieren, die universell funktionieren, können Sie die folgenden Zeilen in den Code einbauen:
# chip=4 für RPi5, chip=0 für ältere Modelle
if gpiodetect | grep -q "pinctrl-rp"; then
chip=4
else
chip=0
fi
In der einfachsten Form schalten Sie mit gpioset einen GPIO-Ausgang auf High oder Low. In den folgenden Beispielen bezieht sich der erste Parameter auf die gpiochip-Nummer. 7 gibt die GPIO-Nummer in BCM-Nomenklatur an, 1 oder 0 den gewünschten Zustand:
gpioset $chip 7=1 # GPIO 7 (Pin 26) auf High stellen
gpioset $chip 7=0 # GPIO 7 (Pin 26) auf Low stellen
Sie können auch mehrere Ausgänge auf einmal steuern (hier GPIO 7, 8 und 25):
gpioset $chip 7=0 8=1 25=0
Durch diverse Optionen können Sie weitere Funktionen steuern (siehe auch man gpioset):
--bias=as-is|disable|pull-down|pull-up aktiviert die internen Pull-up- oder Pull-down-Widerstände.
--mode=exit|wait|time|signal gibt an, wie lange das Kommando laufen soll. Standardmäßig gilt exit, das Kommando wird also sofort beendet. Mit wait wartet das Programm, bis der Benutzer [Return] drückt. Bei der Einstellung time können Sie mit --sec=<n> oder --usec=<n> die gewünschte Wartezeit einstellen. signal bedeutet, dass das Programm weiterläuft, bis es mit [Strg]+[C] beendet wird.
--background führt das Kommando als Hintergrunddienst weiter.
gpioget funktioniert analog zu gpioset: Sie übergeben im ersten Parameter die gpiochip-Nummer (in aller Regel 0), im zweiten Parameter die BCM-Nummer des GPIOs, dessen Input Sie auswerten wollen. Das Ergebnis des Kommandos lautet 0 oder 1, je nachdem, welchen Zustand der Eingang hat.
gpioget $chip 9 # Zustand von GPIO 9 (Pin 21) auslesen
0
Auch mit pinctrl aus dem Paket raspi-utils können Sie GPIO-Funktionen steuern. Der Vorteil von pinctrl besteht darin, dass das Kommando zur Zeit mit allen Raspberry-Pi-Modellen kompatibel ist. Eine Fallunterscheidung, ob das Script auf einem alten oder neuen Modell mit RP1-Chip läuft, entfällt. Außerdem ist das Kommando syntaktisch weitestgehend zu raspi-gpio kompatibel.
Gegen den Einsatz des Kommandos spricht der Umstand, dass das Kommando laut pinctrl -h (der einzigen mir bekannten Dokumentation) nur für Debugging-Zwecke gedacht ist.
Die folgende Aufzählung fasst die wichtigsten Anwendungen des Kommandos zusammen:
pinctrl get [gpionr] ermittelt den aktuellen Status aller GPIOs bzw. des angegebenen GPIOs.
pinctrl funcs [gpionr] ermittelt, welche alternativen Funktionen der angegebene GPIO bzw. alle GPIOs erfüllen können.
pinctrl set gpionr options verändert den Status des angegeben GPIOs. Mögliche Optionen sind:
ip = Inputop = Outputdl = Zustand Low (Drive Low)dh = Zustand High (Drive High)pu = Pull-up-Widerstand aktivpd = Pull-down-Widerstand aktivpn = keine Pull-up/down-Funktiona0 bis a7 = alternative Funktion n aktivierenno = Deaktivieren (no function)Soweit sich sinnvolle Kombinationen ergeben, dürfen mehrere der obigen Optionen auf einmal übergeben werden, jeweils getrennt durch Leerzeichen. Welche alternative Funktionen ein GPIO unterstützt und wie sie nummeriert sind, geht aus pinctrl funcs hervor.
Das folgende Kommando ermittelt, welche Funktionen der GPIO mit der BCM-Nummer 23 unterstützt. Auf dem Raspberry Pi ist dieser GPIO mit Pin 16 des J8-Headers verbunden. GPIO23 kann diverse Funktionen übernehmen:
pinctrl funcs 23
23, PIN16/GPIO23, SD0_CMD, DPI_D19, I2S0_SDO1, SCL3,
I2S1_SDO1, SYS_RIO023, PROC_RIO023, PIO23
Wenn Sie über Pin 26 (BCM-Nummer 07) eine Leuchtdiode angeschlossen haben, dann können Sie die LED wie folgt ein- und ausschalten:
pinctrl set 7 op dh # LED an Pin 26 ein
pinctrl set 7 op dl # LED an Pin 26 aus
Dieser Artikel ist der Auftakt einer Mini-Serie, die sich mit der Script-Programmierung des Raspberry Pi 5 beschäftigt. Geplant sind drei Artikel:
Hinter den Kulissen hat sich mit der Vorstellung des Raspberry Pi 5 mehr geändert, als es in den ersten Testberichten den Anschein hatte. Schuld daran ist der neue I/O-Chip RP1, der unter anderem für die Kommunikation mit der GPIO-Leiste und der Kamera zuständig ist. Der RP1 bringt natürlich viele Vorteile mit sich (u.a. die Möglichkeit, zwei Kameras anzuschließen und größere Bild- bzw. Videomengen zu verarbeiten); er führt aber auch dazu, dass über Jahre etablierte Module und Kommandos nicht mehr funktionieren. Ja, die Raspberry Pi Foundation hat vorgearbeitet und empfiehlt schon eine Weile alternative Werkzeuge. Aber aus Bequemlichkeit blieben viele Programmierer bei langjährig bewährten Tools. Damit ist jetzt Schluss. Wer den Pi 5 als Maker-Tool nutzen will, muss umlernen.
In der Vergangenheit gab es mehrere GPIO-Kommuniktionsmechanismen, z.B. das Lesen/Schreiben von sysfs-Dateien (sys/class/gpio) bzw. das direkte Verändern von Speicherbereichen. Diese Verfahren haben schon in der Vergangenheit oft Probleme bereitet. Beim Raspberry Pi 5 funktionieren sie schlicht nicht mehr. Neue Verfahren verwenden die lgpio-Bibliothek, die wiederum auf eine neue Kernel-Schnittstelle zurückgreift. Diese ist nach außen hin durch die Device-Dateien /dev/gpiochip* sichtbar.
Aus Python-Sicht ist insbesondere das Modul rpi.gpio betroffen. Es ist inkompatibel zum Pi 5 und es gibt anscheinend auch keine Pläne, den Code RP1-kompatibel zu reorganisieren.
Schon seit einiger Zeit empfiehlt die Raspberry Pi Foundation, das gpiozero-Modul zu verwenden. Es stellt für den Einstieg gut geeignete Klassen wie LED oder Button zur Verfügung, eignet sich aber auch für anspruchsvollere Maker-Aufgaben.
Wenn Sie sich partout nicht mit gpiozero anfreunden wollen, gibt es drei Alternativen: lgpio, gpiod und rpi-lgpio.
Das Python-Modul gpiozero macht die Steuerung von Hardware-Komponenten durch GPIOs besonders einfach. Für häufig benötigte Hardware-Komponenten gibt es eigene Klassen. Dazu zählen unter anderem:
LED (Leuchtdiode ein-/ausschalten)PWMLED (Helligkeit einer Leuchtdiode mit Software Pulse Width Modulation steuern)RGBLED (dreifarbige LED, die über drei GPIO-Ausgänge gesteuert wird) TrafficLights (Kombination aus einer roten, gelben und grünen Leuchtdiode)MotionSensor (für PIR-Bewegungssensoren)LightSensor (Lichtdetektor)Button (Taster) Buzzer (Summer)Motor (zur Steuerung von zwei GPIOs für Vorwärts- und Rückwärts-Signale)Robot (zur Steuerung mehrerer Motoren)MCP3008 (für den gleichnamigen A/D-Converter) Das Modul gpiozero ist umfassend dokumentiert:
https://gpiozero.readthedocs.io/en/latest
Ein Hello-World-Beispiel sieht so aus:
#!/usr/bin/env python3
from gpiozero import LED
import time
myled = LED(7) # BCM-Nummer 7 = Pin 26 des J8-Headers
print("LED ein")
myled.on()
time.sleep(1)
print("LED aus und Programmende")
myled.off()
Dieses Script setzt voraus, dass Pin 26 der GPIO-Leiste (intern BCM/GPIO 7) über einen Vorwiderstand mit einer Leuchtdiode verbunden ist. Anstelle der GPIO-Nummer gibt es einige alternative Adressierungsverfahren, wobei Sie den gewünschente GPIO-Kontakt als Zeichenkette angeben:
# alternative, gleichwertige Schreibweisen
myled = LED(7) # GPIO 7 = BCM-Nummer 7
myled = LED("GPIO7") # GPIO 7 (Achtung, nicht "GPIO07")
myled = LED("BCM7") # BCM 7 (nicht "BCM07")
myled = LED("BOARD26") # Pin 26 auf der GPIO-Leiste des Boards
myled = LED("J8:26") # Pin 26 des J8-Headers (= GPIO-Leiste)
lgpio (der Projektname lautet noch kürzer lg) ist eine C-Bibliothek zur lokalen Steuerung der GPIOs. Das gerade erwähnte Modul gpiozero verwendet intern seit Version 2.0 die lgpio-Bibliothek. Alternativ stellt das gleichnamige lgpio-Modul eine direkte Python-Schnittstelle zur lgpio-Bibliothek her. Deren Funktionen sind Hardware-näher implementiert. Der GPIO-Zugriff verbirgt sich also nicht hinter Klassen wie LED oder Button, vielmehr werden die GPIO-Schnittstellen direkt angesprochen.
Ein Hello-World-Beispiel mit lgpio sieht so aus:
#!/usr/bin/env python3
import lgpio, time
# Zugriff auf /dev/gpiochip4 für RP1-Chip
handle = lgpio.gpiochip_open(4)
# Raspberry Pi 4 und früher:
# handle = lgpio.gpiochip_open(0)
# GPIO 7 = Pin 26 als Output verwenden
led = 7
lgpio.gpio_claim_output(handle, led)
# LED zehnmal ein- und ausschalten
for i in range(10):
print("LED ein")
lgpio.gpio_write(handle, led, 1)
time.sleep(1)
print("LED aus")
lgpio.gpio_write(handle, led, 0)
time.sleep(1)
# nichts blockieren
lgpio.gpiochip_close(handle)
Beachten Sie, dass die Initialisierung des Handles für den GPIO-Zugriff je nach Modell variiert! Bei den älteren Raspberry-Pi-Modellen bis einschließlich 4B/400 müssen Sie handle = lgpio.gpiochip_open(0) ausführen. Beim Raspberry Pi 5 ist für die GPIO-Steuerung dagegen der neue RP1-Chip zuständig, den Sie mit gpiochip_open(4) ansprechen. (Die richtige Chip-Nummer stellen Sie am einfachsten mit dem Kommando gpioinfo aus dem Paket gpiod fest. Der hier benötigte Kontakt GPIO7 heißt in gpioinfo ein wenig verwirrend PIN7.)
Wenn Sie mit Python ein lgpio-Script schreiben wollen, das auf allen Pi-Modellen funktioniert, müssen Sie Code zur Erkennung des Pi-Modells integrieren.
Weiterer Codebeispiele finden Sie hier:
Was tun, wenn Sie Code für ältere Modelle entwickelt haben, den Sie nun für den Raspberry Pi 5 portieren möchten? Am schnellsten wird dies oft mit dem neuen Modul rpi-lgpio gelingen, das weitgehende Kompatibilität zu rpi.gpio verspricht.
Vor der Installation müssen Sie das in Raspberry Pi OS standardmäßig installierte Modul rpi.gpio installieren. Eine Parallelinstallation beider Module ist ausgeschlossen, weil rpi.gpio und rpi-lgpio den gleichen Modulnamen verwenden (import RPi.GPIO).
sudo apt remove python3-rpi.gpio
Da es in Raspberry Pi OS für rpi-lgpio kein fertiges Paket, installieren Sie dieses am einfachsten mit pip. Da es kein passendes Systempaket gibt, sind keine Konflikte zu erwarten. Wenn Sie die Option --break-system-packages dennoch vermeiden möchten, müssen Sie eine virtuelle Python-Umgebung einrichten.
pip install --break-system-packages rpi-lgpio
Das obige pip-Kommando installiert das Modul lokal, also nur für Ihren Account. Wenn Sie Ihr Script in einem anderen Account ausführen möchten (z.B. als Cron-Job), stellen Sie dem Kommando sudo voran und installieren so rpi-lgpio systemweit.
Nach diesen Vorbereitungsarbeiten sollten viele Ihre alten Scripts ohne Änderungen laufen. Einige Sonderfälle sind hier dokumentiert:
https://rpi-lgpio.readthedocs.io/en/release-0.4/differences.html
Die folgenden Zeilen zeigen einmal mehr eine Schleife zum Ein- und Ausschalten einer Leuchtdiode:
#!/usr/bin/env python3
# Das Script setzt voraus, dass vorher
# rpi-lgpio installiert wurde!
import RPi.GPIO as gpio
import time
# BCM-GPIO-Nummern verwenden
gpio.setmode(gpio.BCM)
# LED an Pin 26 = GPIO 7
gpio.setup(7, gpio.OUT)
# LED über Pin 26 fünf Mal ein- und ausschalten
for _ in range(5):
print("LED ein")
gpio.output(7, gpio.HIGH)
time.sleep(1)
print("LED aus")
gpio.output(7, gpio.LOW)
time.sleep(1)
# alle vom Script benutzten GPIOs/Pins wieder freigeben
gpio.cleanup()
Das Python-Modul gpiod wird durch das Paket python3-libgpiod zur Verfügung gestellt, das unter Raspberry Pi OS standardmäßig installiert ist. Das Modul stellt eine Python-Schnittstelle zur Bibliothek libgpiod her. Diese Bibliothek ist wiederum eine Alternative zu der schon erwähnten lgpio-Bibliothek. Da es zum Python-Modul kaum Dokumentation gibt, ist gpiod nur für Entwickler von Interesse, die mit libgpiod bereits C-Programme entwickelt haben. Als Ausgangspunkt für eine eigene Recherche eignen sich die beiden folgenden Seiten:
Das folgende Minibeispiel zeigt, wie Sie eine LED an Pin 26 (GPIO 7) fünf mal ein- und ausschalten:
#!/usr/bin/env python3
import gpiod, time
chip = gpiod.Chip('gpiochip4') # RP1 (Raspberry Pi 5)
led = chip.get_line(7) # GPIO 7 = Pin 26 des J8-Headers
led.request(consumer="example", type=gpiod.LINE_REQ_DIR_OUT)
for _ in range(5): # 5x ein- und ausschalten
led.set_value(1)
time.sleep(1)
led.set_value(0)
time.sleep(1)
Dieser Beitrag baut auf dem Artikel „PHP7.4-fpm auf PHP8.1-fpm für Nextcloud“ auf.
Im Januar 2023 hatte ich erklärt, wie ich mein Raspberry Pi OS 11 (basierend auf Debian 11 Bullseye), durch Einbinden einer Fremdquelle, von PHP7.4-fpm auf PHP8.1-fpm aktualisiert habe. Warum ich zu diesem Zeitpunkt die Version 8.1 installiert habe, ist recht einfach zu beantworten. Die aktuelle Version Nextcloud 25 war noch nicht kompatibel zu PHP 8.2. Erst mit Nextcloud 26 war ein Upgrade möglich.
Nun habe ich mich nach der Aktualisierung auf Nextcloud 28 entschieden auf PHP 8.2 zu wechseln. Da ich den FastCGI-Prozessmanager FPM bevorzuge, unterscheidet sich das Upgrade etwas von einer herkömmlichen PHP-Installation.
Zuerst wird das System auf den aktuellen Stand gebracht.
sudo apt update && sudo apt upgrade -y
Ein Check zeigt, welche PHP-Version momentan aktiv ist.
php -v
Hier die Ausgabe:
PHP 8.1.27 (cli) (built: Dec 21 2023 20:17:59) (NTS) Copyright (c) The PHP Group Zend Engine v4.1.27, Copyright (c) Zend Technologies with Zend OPcache v8.1.27, Copyright (c), by Zend Technologies
Jetzt werden alle benötigten Pakete nachinstalliert (auch das von Nextcloud 28 verlangte bz2 und der von mir eingesetzte Redis-Server).
sudo apt install php8.2 php8.2-mbstring php8.2-gd php8.2-curl php8.2-imagick php8.2-intl php8.2-bcmath php8.2-gmp php8.2-mysql php8.2-zip php8.2-xml php8.2-apcu libapache2-mod-php8.2 php8.2-bz2 php8.2-redis
Nun wird via CLI die PHP-Version von 8.1 auf 8.2 mit
sudo update-alternatives --config php
umgestellt.
sudo update-alternatives --config php Es gibt 5 Auswahlmöglichkeiten für die Alternative php (welche /usr/bin/php bereitstellen). Auswahl Pfad Priorität Status ------------------------------------------------------------ 0 /usr/bin/php.default 100 automatischer Modus 1 /usr/bin/php.default 100 manueller Modus 2 /usr/bin/php7.4 74 manueller Modus * 3 /usr/bin/php8.1 81 manueller Modus 4 /usr/bin/php8.2 82 manueller Modus 5 /usr/bin/php8.3 83 manueller Modus
sudo update-alternatives --config php Es gibt 5 Auswahlmöglichkeiten für die Alternative php (welche /usr/bin/php bereitstellen). Auswahl Pfad Priorität Status ------------------------------------------------------------ 0 /usr/bin/php.default 100 automatischer Modus 1 /usr/bin/php.default 100 manueller Modus 2 /usr/bin/php7.4 74 manueller Modus 3 /usr/bin/php8.1 81 manueller Modus * 4 /usr/bin/php8.2 82 manueller Modus 5 /usr/bin/php8.3 83 manueller Modus
Ein abschließender Check zeigt die aktuelle Version.
php -v
PHP 8.2.14 (cli) (built: Dec 21 2023 20:18:00) (NTS) Copyright (c) The PHP Group Zend Engine v4.2.14, Copyright (c) Zend Technologies with Zend OPcache v8.2.14, Copyright (c), by Zend Technologies
Ist die Ausgabe korrekt, kann PHP8.1-fpm deaktiviert, PHP8.2-fpm installiert und aktiviert werden.
sudo a2disconf php8.1-fpm sudo apt install php8.2-fpm sudo a2enconf php8.2-fpm
Der Restart des Webservers führt nun die Änderungen aus.
sudo service apache2 restart
Da in der Nextcloud nun wieder die bekannten Fehlermeldungen auftauchen, heißt es, diese schrittweise abzuarbeiten. Dazu wird die neue php.ini geöffnet
sudo nano /etc/php/8.2/fpm/php.ini
und die Werte für memory_limit sowie session_lifetime wie empfohlen angepasst.
memory_limit = 512M session.gc_maxlifetime = 3600
Der Block
opcache.enable=1 opcache.interned_strings_buffer=64 opcache.max_accelerated_files=10000 opcache.memory_consumption=256 opcache.save_comments=1 opcache.revalidate_freq=1
für den Zwischenspeicher OPchache wird ans Ende der php.ini gesetzt.
Zur Optimierung von PHP8.2-fpm werden speziell für das Modell Raspberry Pi 4 mit 4GB RAM in der Datei www.conf mit
sudo nano /etc/php/8.2/fpm/pool.d/www.conf
folgende Werte von
pm = dynamic pm.max_children = 5 pm.start_servers = 2 pm.min_spare_servers = 1 pm.max_spare_servers = 3
auf
pm = dynamic pm.max_children = 120 pm.start_servers = 12 pm.min_spare_servers = 6 pm.max_spare_servers = 18
angepasst und der Dienst neu gestartet.
sudo service php8.2-fpm restart
Danach muss in der apcu.ini das Command Line Interface des PHP Cache noch aktiviert werden, indem
sudo nano /etc/php/8.2/mods-available/apcu.ini
folgende Zeile am Ende eingetragen wird.
apc.enable_cli=1
Ist dies geschehen, wird der Webserver ein letztes Mal neu gestartet.
sudo service apache2 restart
Die Umstellung bringt zwar im Moment keine erkennbaren Vorteile, jedoch verschafft es wieder ein wenig Zeit und senkt den Druck das eigentliche Raspberry Pi OS 11 Bullseye durch die aktuelle Version 12 Bookworm zu ersetzen.
PHP-FPM (FastCGI Process Manager) ist eine leistungsstarke Erweiterung für den PHP-Interpreter, die die Ausführung von PHP-Skripten optimiert und verbessert. Entwickelt, um die Skalierbarkeit von PHP-basierten Webanwendungen zu erhöhen, spielt PHP-FPM eine entscheidende Rolle in modernen Webserver-Umgebungen.
Traditionell wurde PHP als Modul für Webserver wie Apache bereitgestellt. Dieser Ansatz hatte jedoch seine Einschränkungen, insbesondere wenn es um die Verwaltung von Ressourcen und die Skalierung von Webanwendungen ging. PHP-FPM wurde als Lösung für diese Herausforderungen entwickelt, indem es die FastCGI-Protokollspezifikation implementiert und PHP-Skripte als separate Prozesse ausführt.
PHP-FPM ermöglicht eine effiziente Verwaltung von Ressourcen, indem es separate Prozesse für jede Anforderung erstellt. Dadurch wird der Arbeitsspeicher besser genutzt und die Gesamtleistung der Webanwendung verbessert.
Durch die Nutzung von PHP-FPM können Webentwickler ihre Anwendungen leichter skalieren, da sie die Anzahl der gleichzeitig ausgeführten PHP-Prozesse steuern können. Dies ist besonders wichtig in Umgebungen mit starkem Datenverkehr.
Jede PHP-Anwendung wird in ihrem eigenen Prozess isoliert, wodurch Konflikte zwischen verschiedenen Anwendungen vermieden werden. Dies trägt zur Stabilität des Gesamtsystems bei.
PHP-FPM bietet eine umfangreiche Konfiguration, die es Administratoren ermöglicht, Parameter wie Prozessprioritäten, Anzahl der Kinderprozesse und andere Einstellungen zu optimieren.
Die Konfiguration von PHP-FPM erfolgt über die php-fpm.conf-Datei und optionale Pool-Konfigurationsdateien. Administratoren können Parameter anpassen, um die Leistung und Ressourcennutzung nach den Anforderungen ihrer Anwendung zu optimieren.
Die Integration von PHP-FPM in Webserver wie Nginx oder Apache erfolgt durch die Konfiguration von FastCGI-Servern. Dies ermöglicht eine reibungslose Kommunikation zwischen dem Webserver und PHP-FPM.
PHP-FPM hat sich als wesentliches Werkzeug für die Verwaltung von PHP-Anwendungen in produktiven Umgebungen etabliert. Durch die Bereitstellung von effizienter Ressourcennutzung, Skalierbarkeit und Anwendungsisolierung spielt PHP-FPM eine Schlüsselrolle bei der Gewährleistung der Leistungsfähigkeit von PHP-Webanwendungen. Bei der Entwicklung und Verwaltung von Webanwendungen ist es wichtig, die Vorteile von PHP-FPM zu verstehen und richtig zu konfigurieren, um eine optimale Leistung zu gewährleisten.
Der Black Friday ist für den Einzelhandel ein willkommenes Datum, um Waren an den Mann bzw. die Frau zu bringen. In dieser Zeit wird Lagerware abverkauft, um Platz für Neues zu schaffen. Der Endverbraucher profitiert meist durch Rabatte und Nachlässe auf interessante Artikel.
Angelockt durch solch ein Angebot, habe ich mir eine externe 2TB-SSD zugelegt, um den Speicher meiner Nextcloud zu erweitern. Im Vorfeld hatte ich mir hierzu schon einige Gedanken gemacht, wie ich die alte 500GB SSD durch das neue und größere Speichermedium ersetze.
Die perfekte Lösung für mich war das Duplizieren der Quelle mit Clonezilla. Hierbei wurden beide Festplatten an den Rechner angeschlossen, Clonezilla gestartet und mit device-device ein Duplikat erstellt. Bei diesem musste dann nur noch die Partition vergrößert werden. Da der Zielfestplatte die selbe UUID vergeben wurde, waren im Anschluss keine weiteren Maßnahmen erforderlich.
Die gestrige Veröffentlichung von Linux 6.6 bedeutet, dass das Merge-Window wieder geöffnet ist. Ein erster Kandidat wurde bereits gemerged mit einem Vorhaben, das in den vergangenen Wochen zu vielen Diskussionen geführt hat: bcachefs.
Um bcachefs zu erklären, muss ich kurz ein wenig weiter ausholen. bcachefs geht - wie der Name schon vermuten lässt - auf bcache zurück. Hierbei handelt es sich um ein Kernelmodul, das Einzug in Linux 3.10 in 2013 fand und einen Caching-Layer für Block-Devices einführte.
Daten können somit hybrid zwischen ganz schnellem Speicher (RAM), schnellem Speicher (SSDs) und langsamem Speicher (HDD) aufgeteilt werden. Werden bestimmte Blöcke häufiger abgerufen, werden sie in den schnelleren Speicher verschoben und anders herum ebenso. Dabei handelte es sich aber immer um eine Zwischenschicht, auf der ein echtes Dateisystem aufbauen musste. Während der Entwicklung fiel dem Hauptentwickler Kent Overstreet jedoch schnell auf, dass zu einem "full-fledged" Filesystem nicht mehr viel fehlte.
Ein erster Prototyp entstand bereits im Jahre 2015 und hat somit die Ära der Dateisysteme der neusten Generation eingeläutet. Auch btrfs gehört zu diesen moderneren Dateisystemen und setzt auch auf das Copy-on-Write-Prinzip. Da die Blöcke einer Datei nicht bei einer Kopie dupliziert werden, spart dies Speicherplatz und ermöglicht verzögerungsfreie Snapshots.
bcachefs mit seinen über 90.000 Zeilen Code konnte zwar - wie für ein neues Dateisystem üblich und nötig - ausgiebig getestet werden, war allerdings bisher nicht im Mainline Linux vorhanden. Mitte des Jahres ging es dann an die Einarbeitung des Codes.
Eigentlich sollte bcachefs schon in Linux 6.5 Einzug halten. Aber aufgrund andauernder Spannungen wurde auch bei Linux 6.6 aus dem Vorhaben nichts. Eines der Probleme sind die teils umfangreichen Änderungen in fremden Modulen, die den Unmut der Maintainer auf sich gezogen haben. Wer sich dafür interessiert, kann sich den großen E-Mail-Thread ansehen. Linus Torvalds stand grundsätzlich einer Übernahme positiv gegenüber, wollte aber noch einen Test in linux-next abwarten. Dies ist zwischenzeitlich geschehen.
Nun also der Merge in den Kernel. Sollten sich die Änderungen bis zum Release halten, steht somit dem Einsatz des neuen Dateisystems ab der Veröffentlichung von Linux 6.7 nicht mehr viel im Wege. Die Aufnahme in Mainline vereinfacht aber auch die Entwicklung, da diese nun nicht mehr Out-of-Tree stattfindet, was aufgrund der hohen Änderungsgeschwindigkeit im Linux-Source-Tree schnell zu aufwändigen Anpassungsarbeiten führen kann.
Weitere Informationen zu bcachefs sind auf der eigenen Homepage abrufbar. Hier ist auch eine Schnellstartanleitung für den eigenen Einsatz zu finden.
Wer sich schon einmal mit MTAs (Mail Transfer Agent) auseinandergesetzt hat, dem wird Postfix sicherlich ein Begriff sein. Postfix zählt zu den bekanntesten Mailservern im Linuxbereich, ist schnell und recht einfach zu konfigurieren, eine gewisse Grundkenntnis vorausgesetzt. Für einen sicheren Mailverkehr möchte ich hier noch einmal auf das Crypto Handbuch verweisen.
Letzte Woche war ja ein wenig Exchange Server im Programm, heute soll es aber um eine Auswertung des Mailverkehrs, welcher täglich über einen Postfix Server rauscht, gehen.
Hierfür gibt es sicherlich einige Monitoring Tools, eines davon ist Pflogsumm (Postfix Log Entry Summarizer), welches eine ausführliche Auswertung bietet, ohne, dass der Anwender viel konfigurieren muss.
Unter Ubuntu ist dieses Tool recht schnell konfiguriert und im Optimalfall erhaltet ihr am Ende eine Übersicht aller Nachrichten, egal ob gesendet, empfangen oder geblockt. Auch der Traffic, die Menge oder die Mailadressen werden ausgewertet. Bis zu dieser Statistik ist aber noch ein wenig Vorarbeit zu leisten.
sudo apt-get install pflogsumm
Ihr habt nun die Möglichkeit das Tool direkt aufzurufen und euch eine Liveauswertung geben zu lassen, um zu sehen was gerade auf dem Mailserver passiert. Pflogsumm macht nichts anderes, als auf die Logfiles des Postfix Server zurückzugreifen und diese auszuwerten. Mit einem Einzeiler lässt sich so eine Statistik in eine Datei schreiben oder per Mail versenden.
sudo pflogsumm -u 5 -h 5 --problems_first -d today /var/log/mail.log >> test oder
sudo pflogsumm -u 5 -h 5 --problems_first -d today /var/log/mail.log | mail -s "Postfix Mail Report" info@example.com
Eine IST Auswertung mag zwar interessant sein, die regelmäßige Auswertung der letzten Tage ist jedoch um einiges interessanter. Realisierbar ist dies mit den Logs des Vortages, diese werden Mittels logrotate gepackt und können danach ausgewertet werden. Zunächst muss logrotate angepasst werden, damit täglich neue Logs geschrieben werden.
sudo nano /etc/logrotate.conf
/var/log/mail.log {
missingok
daily
rotate 7
create
compress
start 0
}
sudo nano /etc/logrotate.d/rsyslog
#/var/log/mail.log
Wenn gewünscht ist, dass die Logrotation pünktlich zu einer gewissen Uhrzeit laufen soll, sagen wir um 2 Uhr Nachts , ist es nötig crontab zu editieren und dort die Laufzeit anzupassen.
sudo nano /etc/cron.daily anzupassen 0 2 * * * root test -x /usr/sbin/anacron || ( cd / && run-parts --report /etc/cron.daily )
Nun können wir unser eigenes Script zusammen stellen, welches am Schluss eine Auswertung versendet.
sudo nano mailstatistiken.sh
#!/bin/bash
#
###############
# mailstats #
###############
PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin
# Log Archive entpacken
gunzip /var/log/mail.log.1.gz
#Temporaere Datei anlegen
MAIL=/tmp/mailstats
#Etwas Text zum Anfang
echo "Taeglicher Mail Stats Report, erstellt am $(date "+%H:%M %d.%m.%y")" > $MAIL
echo "Mail Server Aktivitaeten der letzten 24h" >> $MAIL
#Pflogsumm aufrufen
/usr/sbin/pflogsumm --problems_first /var/log/mail.log.1 >> $MAIL
# Versenden der Auswertung
cat /tmp/mailstats | mail -s "Postfix Report $(date --date='yesterday')" stats@example.com
#Archiv wieder packen, damit alles seine Ordnung hat
gzip /var/log/mail.log.1
Insgesamt eine leichte Übung. Das fertige Skript noch mit "chmod +x" ausführbar machen und am besten via "crontab -e" zu einem gewünschten Zeitpunkt ausführen.
Am Ende solltet ihr jeden Tag per Mail eine ausführliche Zusammenfassung der E-Mails Statistiken erhalten.
Grand Totals
------------
messages
4321 received
1234 delivered
5 forwarded
1 deferred (3 deferrals)
0 bounced
0 rejected (0%)
0 reject warnings
0 held
0 discarded (0%)
1234m bytes received
1234m bytes delivered
123 senders
321 sending hosts/domains
1234 recipients
123 recipient hosts/domains
message deferral detail
-----------------------
smtp (total: 3)
3 invalid sender domain 'example.de' (misconfigured ...
message bounce detail (by relay): none
message reject detail: none
message reject warning detail: none
message hold detail: none
message discard detail: none
smtp delivery failures: none
Warnings: none
Fatal Errors: none
Panics: none
Master daemon messages: none
Per-Hour Traffic Summary
------------------------
time received delivered deferred bounced rejected
--------------------------------------------------------------------
0000-0100 0 0 0 0 0
.....
Vor kurzem gab es das „WinRAR | 9GAG Special Offer!“ und ich bin einer von 5449 Personen, die bei diesem Angebot zugeschlagen haben. Der Key gilt nicht nur für WinRAR, sondern auch für die...![]()
Zwei neue adminForge Services können ab sofort genutzt werden. 1) Hat.sh ist eine Webanwendung, die eine sichere lokale Dateiverschlüsselung im Browser ermöglicht. Sie ist schnell, sicher und verwendet moderne kryptografische Algorithmen mit Chunked-AEAD-Stream-Verschlüsselung/Entschlüsselung. 2)...
by adminForge.
Der Pinecil v2 kann, wie der Pinecil v1 und andere IronOS-kompatible Lötkolben, mit einem eigenen Bootlogo versehen werden. Hierfür müssen folgende Voraussetzungen erfüllt sein: Pinecil v2 mit IronOS 2.22-rc (oder neuer) Ich für diese...![]()
Ich habe mir mit einem Odroid HC1 ein zusätzliches NAS aufgebaut, auf welchen mein Proxmox VE Server täglich sichern soll. Sofern ihr noch keinen freigegebenen Ordner, auf welchen der Proxmox VE Server am Ende...![]()
Heute ist die erste Beta der neuen Ubuntu Version 10.10 "Maverick Meerkat" erschienen.
Das System wurde nicht nur beim Bootvorgang optimiert, sondern hat auch Updates bei GNOME (2.31), KDE(4.5.0), Xfce(4.6.2) und MythTV(0.23.1) erfahren.
Zusätzlich wurde das Softwarecenter überarbeitet, es soll schneller geworden sein und bietet eine History an. Das ganze läuft auf dem Linux Kernel 2.6.35-19.28.
Viel Spaß beim Testen.
![]()
Bei LinuxTrends ist eine schöne Anleitung zu finden, wie man seiner aktuellen Ubuntu Installation, dass Look & Feel eines Windows 7 aufzwingt.
Dabei wird quasi ein Gnome Theme installiert, welches alle nötigen Grafiken mit sich bringt. Wer dann mit seinem Windows Look auch noch Windows Programme nutzen will, der ist mit Wine gut bedient, welches ich letzten Monat mal kurz vorgestellt hatte.
![]()
![]()
Viele, die den Einstieg in Linux noch nicht gewagt haben und es eventuell ausprobieren möchten, für die ist Ubuntu oft die erste Wahl. Diese Linuxdistribution hat sich quasi zum Standard für Anfänger gemausert. Sie ist schnell installiert, der Umstieg von Windows geht leicht von der Hand und es gibt eine große Nutzergemeinde im Netz, die für Fragen und Antworten zur Verfügung steht. Ubuntu muss nicht einmal installiert werden, sondern kann zum Testen auch direkt von CD gestartet werden oder, wie vor ein paar Tagen schon geschrieben, direkt von einem USB-Stick. So spart man sich "teure" Rohlinge.
Auf der Chip Homepage kann man nun ein kleines aber praktisches Handbuch (auf Deutsch) für Anfänger bzw. Einsteiger herunterladen. Dort wird Schritt für Schritt erklärt, was Ubuntu so zu bieten hat. Wer es etwas ausführlicher mag, der ist bei Galileo Computing bestens aufgehoben. Dort steht ein über 1000-seitiges Buch online zum Schmökern zur Verfügung. Natürlich gibt es auch jede Menge Foren im Netz, wobei es jedem selbst überlassen ist, welches einem am besten liegt.
![]()
Häufig kommt es vor, dass man auf eine Live CD angewiesen ist, sei es um einen PC von Malware oder Viren zu befreien oder um wichtige Daten vom dahinscheidenden System zu sichern. Die normale Variante wäre, eine CD zu erstellen und von dieser zu booten. Einfacher und schneller ist es jedoch das ganze auf einen USB-Stick zu packen und von diesem zu starten. Früher war das Erstellen solcher bootfähigen Sticks noch mit ein wenig mehr Aufwand verbunden. Inzwischen gibt es aber Programme, die einem die Arbeit abnehmen. Drei davon möchte ich hier vorstellen. Alle sind natürlich umsonst nutzbar. Der Aufbau der drei Programme ist sehr ähnlich. Man wählt die gewünschte Live Version aus, sucht die Quelldatei, entweder lokal oder im Internet und startet die Installation auf den Stick. Zu beachten ist, dass alle vorhandenen Daten auf dem Stick verloren gehen.
Den Anfang macht UNetbootin. Das Programm ist unter allen gängigen Windows Versionen lauffähig und unterstützt jede Menge Distributionen, die komplette Liste ist auf der Homepage einsehbar.
![]()
Zweites Programm in der Runde ist der Universal USB Installer von Pendrivelinux.
Das Programm sieht fast genauso aus wie UNetbootin und bietet eine ähnlich breite Unterstützung für Live CDs.
Von Clonezilla bis xPUD ist alles dabei.
![]()
Drittes und letztes Programm dieser Art ist der Linux Live USB Creator. Dieser kommt in einem etwas modernen Gewand und bringt mehr Farbe ins Spiel. Auf der Homepage ist eine ausführliche Liste der unterstützten Systeme zu finden, so wie eine genaue Anleitung.
![]()
Den besten Look hat wohl der Linux Live USB Creator. Wichtig ist aber die Funktionalität und darum muss jeder selbst entscheiden, welches Programm er für seine Zwecke am besten gebrauchen kann.
Wine 1.2 ist erschienen. Nach langer Entwicklung gibt es eine neue finale Version des Programms. Wine ermöglicht es Programme, die eigentlich nur für Windows geschrieben wurden, auch unter Linux laufen zu lassen.
Wichtigste Neuerung ist wohl die 64Bit Unterstützung. Der komplette Changelog ist auf der Homepage zu finden. Auf der Downloadseite sind diverse Pakete für die verschiedenen Distributionen zu finden. Sollte eigentlich für jeden Geschmack was dabei sein.
![]()
Für mich ist die Erreichbarkeit von Webseiten der von mir betreuten Webseiten und Dienste sehr wichtig. Hierfür nutze ich nicht nur Icinga2 in Verbindung mit Grafana, sondern auch ein ziemlich simples, aber auch mächtiges Werkzeug. Uptime-Kuma eine Opensource on premise Monitoringsoftware.
Der Beitrag Uptime Kuma, mein Monitoring Werkzeug erschien zuerst auf Got tty.
Am 1. April 2022 kündigten die Macher von 351ELEC über den Discord Server des Projektes einen neuen Namen an, dieses solle von nun an „PineappleELEC“, in Anlehnung an das letzte Release mit dem Codenamen...![]()
Der Xbox One Digital TV Tuner ist mit ~15€ der günstigste DVB-T2 & DVB-C USB-Stick, welcher auch unter Linux nutzbar ist. In diesem Beitrag zeige ich euch, wie ihr den benötigten Treiber unter CoreELEC...![]()
Smart Homes sind in aller Munde. Bei Neubauten sowieso, aber auch bestehende Immobilien werden gerne zu so genannten Smart Homes umgerüstet. Den großen Markt teilen sich natürlich kommerzielle Anbieter, aber gerade auf der Softwareseite konkurrieren auch freie und open source Software um die Kunden. Die bekanntesten Teilnehmer im open source Bereich sind FHEM, OpenHAB und Home Assistant (früher bekannt als hass.io).
Diese Software soll verschiedene smarte Geräte vereinen, so dass sie alle unter einer Haube stecken. Anstatt jeweils eine Anwendung für die Heizung, das Licht und die Energieversorgung zu verwenden, soll die Software übergeordnet sein. Sie bildet damit die Schnittstelle zwischen den Geräten und mir.
Ich möchte mein Haus mit dem Home Assistant smart machen, bzw. einige der vorhandenen Komponenten dort einbinden. In diesem Artikel möchte ich zunächst auf die Installation von Home Assistant Container eingehen.
Der mächtige Home Assistant wird gerne auf einem Raspberry Pi installiert. In der Regel verwendet man dafür gleich ein ganzes Image für das Betriebssystem. Das bedeutet, dass man statt des üblichen Raspbian das „Home Assistant Operating System“ installiert.
Der Vorteil liegt darin, dass man den Home Assistant in vollem Umfang nutzen kann. Der Nachteil ist, dass man über ein stark angepasstes OS verfügt. Möchte man noch weitere Software darauf laufen lassen, könnte das zu Konflikten führen.
In meinem Fall laufen noch andere Prozesse auf dem Raspberry. Somit kommt für mich das OS nicht infrage. Stattdessen möchte ich auf Home Assistant Container setzen. Hier läuft die Software über Docker.
Benutzt man den Home Assistant Container, muss man mit Einschränkungen leben. Es ist beispielsweise nicht möglich, Add-ons zu installieren. Der Grund liegt meines Wissens darin, dass Add-ons als (Docker-)Container installiert werden. Und das geht nicht, wenn bereits die Hauptanwendung in einem (Docker-) Container läuft. [Falls das jemand genauer weiß, gerne einen Kommentar hinterlassen!]
Was man als Vorbereitung braucht, ist ein installiertes Linux-System. In meinem Beispiel ist es Raspbian auf einem Raspberry Pi 4. Dort meldet man sich via SSH an.
Schritt 1: Docker installieren. Gegebenenfalls hat man eine alte Version bereits installiert. Diese muss man entfernen und die aktuelle Version installieren. Dazu wird das Docker-Repository hinzugefügt und die Software daraus installiert. Am Ende wird eine Benutzergruppe „docker“ erstellt (ggf. geschieht das automatisch). Der aktuelle Benutzer – hier nennt er sich pi – wird der Gruppe hinzugefügt.
sudo apt-get remove docker docker-engine docker.io containerd runc
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg lsb-release
curl -fsSL https://download.docker.com/linux/debian/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/debian \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
sudo groupadd docker
sudo usermod -aG docker piSchritt 2: Home Assistant Container installieren. Der folgende Befehl holt sich das entsprechende Image aus dem Dockerhub, lädt es herunter und installiert es. Es ist wichtig, dass der Ordnerpfad für die Konfigurationsdatei korrekt angegeben wird. Wie oben bereits beschrieben, fehlt die Add-on-Funktion. Um die configuration.yaml bearbeiten zu können, muss man an diese Datei herankommen. Mit der Flag -v mountet man einen existierenden Ordner in den Docker-Container und kann damit die Datei weiterhin bearbeiten.
mkdir /home/pi/homeassistant/config
docker run -d \
--name="homeassistant" \
--privileged \
--restart=unless-stopped \
-e "TZ=Europe/Berlin"
-v /home/pi/homeassistant:/config \
--net=host \
homeassistant/home-assistant:stableWer lieber Docker Compose verwendet, kann den folgenden Eintrag in die *.yaml eintragen:
name: smart_home_p10
services:
home-assistant:
container_name: homeassistant
privileged: true
restart: unless-stopped
environment:
- TZ=Europe/Berlin
volumes:
- /home/pi/homeassistant:/config
network_mode: host
image: ghcr.io/home-assistant/home-assistant:stableSchritt 3: Docker-Image verwalten. Die gesamte Home Assistant Installation kann man über den Container starten und stoppen. Ein Update führt man ebenfalls über das Docker-Image aus. Die Befehle hierfür lauten folgendermaßen.
# Update installieren
docker pull homeassistant/home-assistant:stable# Container stoppen und entfernen
docker stop homeassistant
docker rm homeassistantSchritt 4: Auf Home Assistant zugreifen. Ab jetzt erfolgt die Verwaltung des Home Assistant über die Weboberfläche. Mit http://<IP-Adresse des Raspberrys>:8123 kann man von einem PC des gleichen Netzwerks auf die Installation zugreifen. Änderungen an der configuration.yaml müssen weiterhin über die Systemoberfläche, also z.B. mit nano oder vim über SSH erfolgen.
nano /home/pi/homeassistant/config/configuration.yamlThe post Home Assistant Container installieren first appeared on bejonet - Linux | Smart Home | Technik.
Ich habe mir vor kurzem den „SONOFF Zigbee 3.0 USB Dongle Plus“ gekauft. Dieser wird standardmäßig mit der Z-Stack 3.x.0 Firmware Version „20210120“ ausgeliefert, die (Stand August 2024) aktuelle Z-Stack Firmware Version ist „20240710“....![]()
MX-21 Wildflower ist verfügbar Das Linux Betriebssystem MX Linux stellt ab sofort die neue Version MX-21 Wildflower zur Verfügung. Diese nutzt als Basis Debian 11 Bullseye. Dies ist die aktuelle stabile Version von Debian. Selbstverständlich wird diese Distribution auch mit deutschen Sprachpaketen ausgeliefert. MX-21 Wildflower wird wie seine Vorgänger mit drei Desktopumgebungen angeboten. XFCE in… Weiterlesen MX Linux veröffentlicht MX-21 Wildflower
Der Beitrag MX Linux veröffentlicht MX-21 Wildflower erschien zuerst auf Die Seite für LINUX UMSTEIGER.